
Stepper а§Ѓа•Ла§Яа§∞а•На§Є (а§Єа•На§Яа•З৙а§∞)

а§Іа•Нৃৌ৮: ৙ড়৮ ৙а•На§∞а§Ха§Ња§∞ Stepper а§Єа§Ха•На§Ја§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, Stepper_Dir а§Фа§∞ Pwm_Fast а§Ж৙ а§Й৙ৃа•Ла§Ч а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§Єа§Ва§Єа•На§Ха§∞а§£ 5.0 Dell вАЩ а§Па§Ъа§Па§Па§≤, а§Фа§∞ Theremino а§Ѓа§Ња§Єа•На§Яа§∞ а§Ха•З ৪ৌ৕ а§Е৶а•Нৃ১৮ а§Ха§ња§ѓа§Њ а§Ьৌ৮ৌ а§Ъа§Ња§єа§ња§П а§Ђа•Йа§∞а•На§Ѓ а§Ђа§∞а•Нু৵а•За§ѓа§∞ 3.2 а§ѓа§Њ ৐ৌ৶ а§Ха•З а§Єа§Ва§Єа•На§Ха§∞а§£.
а§Ха•На§ѓа§Њ а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§ђа§Ња§єа§∞ а§Ца•Ла§Ь৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ ৮৵а•А৮১ু а§Па§Ъа§Па§Па§≤ а§Єа§ња§∞а•На§Ђ а§Й৙ৃа•Ла§Ч а§Ха§∞১а•З а§єа•Иа§В, а§Ѓа§Ња§Єа•На§Яа§∞ а§Х৮а•За§Ха•На§Я а§Ха§∞а•За§В а§Фа§∞ ৙ড়৮ а§Ха•А а§Чড়৮১а•А. а§Ѓа•Ва§≤ а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Ха•З৵а§≤ а§Ыа§є ৙ড়৮ ৕ৌ, а§Єа§Ва§Єа•На§Ха§∞а§£ а§Єа•З 3.2 ৵а•З 10 а§Єа§Ва§Єа•На§Ха§∞а§£ а§Ха•З ৐ৌ৶ а§Єа•З а§Фа§∞ 4 ৵а•З 12.
а§Ха•Л ৮৵а•А৮১ু а§Ђа§∞а•Нু৵а•За§ѓа§∞ (4.0) а§Ьа•Ла§°а§Ља•За§В а§Ыа§є ৮а§П а§Ѓа§Ња§Єа•На§Яа§∞ ৙ড়৮ (৙ৌ৪ а§Єа•З а§Ча•Ба§Ьа§∞ 6 а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙ড়৮ 12 ৙ড়৮). а§За§Єа§≤а§ња§П, а§єа§∞ а§Ѓа§Ња§Єа•На§Яа§∞ а§Ха•З ৪ৌ৕ а§Ѓа•Йа§°а•На§ѓа•Ва§≤, а§Ж৙ ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, ১а•А৮ а§За§Ва§Ь৮ ৙а•На§≤а§Є ৙ৌа§Ва§Ъ а§За§Ва§Ь৮ ১а§Х а§Ыа§є а§Ьа•З৮а•За§∞а§ња§Х ৙ড়৮ ৙а•На§≤а§Є ৶а•Л а§Ьа•З৮а•За§∞а§ња§Х ৙ড়৮ а§Єа•З. ৵а•Иа§Ха§≤а•Н৙ড়а§Х а§∞а•В৙ а§Єа•З а§Ж৙ а§Ьа•Ла§°а§Љ а§Єа§Х১а•З а§єа•Иа§В а§Е১ড়а§∞а§ња§Ха•Н১ а§Єа•Н৵ৌুа•А а§Фа§∞ ৶ৌ৪.
Stepper а§Ха•З ৮ড়ৃа§В১а•На§∞а§£ а§Єа•Б৵ড়৲ৌа§Уа§В а§Ха•З ৪ৌ৕ а§Ђа§∞а•Нু৵а•За§ѓа§∞ Theremino:
- а§Еа§≤а•На§Яа•На§∞а§Њ ৙а•На§∞а§ђа§В৲৮-а§Єа§∞а§≤ thereminico ৴а•Иа§≤а•А.
- а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§Ха•З৵а§≤ а§Па§Х ৶ড়ৃৌ а§≠а•За§Ь৮ৌ а§Ъа§Ња§єа§ња§П, а§Ча§В১৵а•На§ѓ а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В (৮а•Ла§Я 1)
- а§Й৙ৃа•Ла§Ча•А а§Ха§Ња§Ѓ а§Ха§∞ а§Єа•Аа§Ѓа§Њ а§Єа•З -10 а§Ѓа•За§В +10 а§Ѓа•А (а§Ха§ња§≤а•Ла§Ѓа•Аа§Яа§∞) (а§Ѓа§ња§Ѓа•А а§Ха•З а§≤а§ња§П а§Ъа§∞а§£а•Ла§В а§Ха•З ৪ৌ৕ = 200)
- а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙ৌа§Ва§Ъ а§Еа§Ха•На§Ј а§Єа•Аа§П৮৪а•А ু৴а•А৮а•Ла§В а§Ха•З ৙а•На§∞а§ђа§Ва§І.
- а§Ыа§є а§За§Ва§Ь৮а•Ла§В ১а§Х reprap ১а•А৮ ৙а•На§∞а§Ха§Ња§∞ ু৴а•А৮а•Ла§В ৙а•На§∞а§ђа§В৲৮ (а§Па§Ха•На§Є, y, z, Z а§Ча•И৮а•На§Яа•На§∞а•А а§Фа§∞ ৶а•Л а§Ѓа•Б৶а•На§∞а§Ња§Єа•На§Ђа•А১ড় а§Ха•А ৶а§∞ ু৴а•А৮ а§Ха•З а§Е৮а•Ба§Єа§Ња§∞). а§Ж৙ а§Йа§Єа§Ха•З ৐ৌ৶ ৶а•Л а§∞а§Ва§Ч а§ђа§Ња§єа§∞ ৮ড়а§Ха§Ња§≤৮ৌ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В.
- а§За§Єа§Ха•З а§Еа§≤ৌ৵ৌ 65 ৪ৌ৕-৪ৌ৕ kHz а§Еа§Іа§ња§Х১ু а§Ж৵а•Г১а•Н১ড় ৙а§∞ а§Єа§≠а•А ৙ৌа§Ва§Ъ а§За§Ва§Ь৮ (৮а•Ла§Я 2)
- а§Ха§Њ а§Ша§ђа§∞ৌ৮ৌ а§Ха§Ѓ а§Єа•З а§Ха§Ѓ 20 ৮а•И৮а•Л а§Єа•За§Ха§Ва§° (৮а•Ла§Я 3)
- а§Єа§Ѓа§Ња§ѓа•Ла§Ьа•На§ѓ а§Еа§Іа§ња§Х১ু а§Ч১ড় (а§Єа•З 1 а§Ѓа•За§В 18000 а§Па§Ѓ а§Па§Ѓ/ুড়৮а§Я) (৮а•Ла§Я 4)
- а§Єа§Ѓа§Ња§ѓа•Ла§Ьа•На§ѓ а§Еа§Іа§ња§Х১ু ১а•Н৵а§∞а§£ (а§Єа•З 5 а§Ѓа•За§В 1000 mm/s/а§Па§Є) (৮а•Ла§Я 4)
- а§Єа•Н৕ড়১ড় ৙а§∞ ৙৺а•Ба§Ба§Ъ а§Са§°а§ња§Я а§∞ড়৙а•Ла§∞а•На§Я, а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В, ৙а•На§∞১а•На§ѓа•За§Х а§Еа§Ха•На§Ј а§Ха•З а§≤а§ња§П (৮а•Ла§Я 5)
- а§Єа•Н৵১а§В১а•На§∞ а§ѓа§Њ ৪ু৮а•Н৵ড়১ а§Еа§Ха•На§Ја•Ла§В а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ѓа•За§В 2D а§Фа§∞ 3 а§°а•А а§Ѓа•За§В а§Єа§Ва§≠ৌ৵৮ৌ (৮а•Ла§Я 6)
- а§Ха•З ৪ৌ৕ ৪ু৮а•Н৵ৃ axes 2D а§ѓа§Њ 3 а§°а•А а§Ѓа•За§В, ৮ড়ৃа§В১а•На§∞а§£ ৐৮ৌৃৌ а§Ж৪ৌ৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч а§≤а§ња§Ц৮а•З. а§Ж৙ ১а•Н৵а§∞а§£ а§Фа§∞ а§Ч১ড় а§Ха•А а§Ча§£а§®а§Њ а§Ха§∞৮а•З а§Ха•А а§Ж৵৴а•На§ѓа§Х১ৌ ৮৺а•Аа§В. а§Ж৙ а§Єа§∞а§≤ а§≤а§Ха•На§Ја•На§ѓ а§Ж৶а•З৴ а§≠а•За§Ь а§Єа§Х১а•З а§єа•Иа§В, а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В. (৮а•Ла§Я 7)
- а§Єа•Н৵а§Ъа§Ња§≤ড়১ а§Ъа•Ма§°а§Ља§Ња§И а§Ха•З ৪ৌ৕ ৶ৌа§≤а•За§В. а§Ха§Ња§∞а•На§∞৵ৌа§И а§Єа§∞а§≤а•Аа§Ха•Г১ а§єа•И а§Фа§∞ а§Ъа§∞а§£ ৮а•Ба§Х৪ৌ৮ а§Ха§Њ а§Ц১а§∞а§Њ ৮৺а•Аа§В а§єа•И, ৶а•Н৵ৌа§∞а§Њ а§За§Є ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ а§Ха•А а§Па§Х а§Ча§Ља§≤১ а§Єа•За§Яа§ња§Ва§Ч а§Ха•А ৵а§Ьа§є. а§Ж৙ а§Ђа•Ла§Яа•Л-а§Х৙а•На§≤а§∞а•На§Є а§≤а•За§Ва§Є а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, ৃ৶ড় а§Ж৙ а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Єа•Аа§Ѓа§Њ (৮а•Ла§Я 8)
- а§Єа•Н৵১: polarity. ৙а•На§∞а§Ха•На§∞а§ња§ѓа§Њ а§Єа§∞а§≤ а§єа•И а§Фа§∞ а§Ж৙ а§Ъа§∞а§£ ৺ৌ৮ড় а§Єа•З а§ђа§Ъ৮а•З, ৶а•Н৵ৌа§∞а§Њ а§За§Є ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ а§Ха•А а§Ча§Ља§≤১ а§Єа•За§Яа§ња§Ва§Ч а§Ха•А ৵а§Ьа§є (৮а•Ла§Я 9)
(৮а•Ла§Я 3) ১а•Ба§≤৮ৌ а§Ха•З а§∞а•В৙ а§Ѓа•За§В: Mach3 а§Па§Х а§Ша§ђа§∞ৌ৮ৌ а§єа•И 500 а§Еа§Іа§ња§Х а§Єа•З а§Еа§Іа§ња§Х а§ђа§Ња§∞ (а§Єа•З 2 а§Ѓа•За§В 15 PC ৙а§∞ ৮ড়а§∞а•На§≠а§∞ а§Ха§∞১ৌ а§єа•И а§єа§Ѓа•За§В). а§єа•И а§Па§Х а§ђа§єа•Б১ а§Ха§Ѓ а§Ха§≤а§Ѓа§≤ৌ৮ৌ, а§Еа§Іа§ња§Х১ু а§Ч১ড় ৙а§∞ а§Ъа§∞а§£а•Ла§В а§Ха•Л а§Ца•Л৮а•З а§Ха•З а§Ьа•Ла§Ца§ња§Ѓ а§Ха•З ৐ড়৮ৌ а§Ха§Ња§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ а§Ха•А а§Е৮а•Бু১ড় ৶а•З১ৌ а§єа•И. а§Єа§Ѓа§ѓ а§Ха•З ১ৌа§≤а§Ѓа•За§≤ ৶а•Ла§Ј Mach3 а§Єа•З а§Еа§Ъа•На§Ыа•А ১а§∞а§є а§Єа•З ৵а•На§ѓа§Ња§Ца•На§ѓа§Њ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В а§За§Є а§Жа§≤а•За§Ц а§Ѓа•За§В.
(৮а•Ла§Я 4) а§Ђа§∞а•Нু৵а•За§ѓа§∞ ৙а•На§∞১а•На§ѓа•За§Х ১а•На§∞а•Ба§Яа§њ а§Єа•З а§Ѓа•Ла§Яа§∞ а§Ха•А а§∞а§Ха•На§Ја§Њ а§Ха§∞১ৌ а§єа•И. ৃ৶ড় а§Ж৙а§Ха§Њ PC а§Ха•Ба§Ы а§Єа§Ѓа§ѓ а§Ха•З а§≤а§ња§П ৙а•На§∞১а•На§ѓа•Б১а•Н১а§∞ ৶а•З৮ৌ а§ђа§В৶ а§Ха§∞ ৶а•З১ৌ а§єа•И, а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Іа•Аа§∞а•З а§Іа•Аа§∞а•З а§Ж১ৌ а§єа•И, а§Ъа§∞а§£а•Ла§В а§Ха•Л а§Ца•Л৮а•З а§Ха•З ৐ড়৮ৌ. а§°а•За§Яа§Њ а§Ха•З ৪ৌ৕ а§Е৮ড়ৃুড়১ а§Єа§Ѓа§ѓ а§≠а•За§Ьа§Њ а§Ча§ѓа§Њ а§єа•И а§ѓа§Њ а§Ѓа•За§В ১а•На§∞а•Ба§Яа§ња§ѓа§Ња§Б а§єа•Л, ১а•Л ৵৺а•А а§≤а§Ња§Ча•В а§єа•Л১ৌ а§єа•И.
(৮а•Ла§Я 5) а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ ৙৥৊ৌ а§Єа§Х১ৌ а§єа•И а§≤ৌ৙১ৌ ৶а•Ва§∞а•А, а§єа§∞ а§Ѓа§ња§≤а•Аа§Єа•За§Ха§Ва§°, ৙а•На§∞১а•На§ѓа•За§Х а§Еа§Ха•На§Ј а§Ха•З а§≤а§ња§П а§Фа§∞ а§Йа§Ъа•На§Ъ ৙а§∞ড়৴а•Б৶а•Н৲১ৌ а§Ха•З ৪ৌ৕ (а§Па§Х а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ха•А а§Па§Х thousandth а§Ха§Њ а§Еа§В৴). а§Ж৙ а§За§Є а§Ьৌ৮а§Ха§Ња§∞а•А а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•А а§Ж৵৴а•На§ѓа§Х১ৌ ৮৺а•Аа§В, а§≤а•За§Хড়৮ а§Ха•Ба§Ы а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч а§За§Єа•З а§ђа§єа•Б১ а§Єа§єа§Ь а§Ѓа§ња§≤ а§Єа§Х১а•А а§єа•И. ৮ড়৶ৌ৮ а§Й৶а•Н৶а•З৴а•На§ѓа•Ла§В а§Ха•З а§≤а§ња§П а§Й৙ৃа•Ла§Ча•А а§єа•Л а§Єа§Х১ৌ а§єа•И, а§ѓа§Њ а§Па§≤а•На§Ча•Ла§∞ড়৶ু а§Ха•З а§≤а§ња§П а§Ха§њ а§Па§Х ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Єа§єа§ња§Ја•На§£а•Б১ৌ а§Ха•Л ৙а•Ва§∞а§Њ а§Ха§∞৮ৌ а§єа•Ла§Ча§Њ. а§За§Є а§Ьৌ৮а§Ха§Ња§∞а•А а§Ха•З ৪ৌ৕ а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§ђа§В৶ а§≤а•В৙ а§Ха•З ৪ৌ৕ а§Фа§∞ а§єа§Ѓа•З৴ৌ а§Еа§Іа§ња§Х১ু а§Ч১ড় ৙а§∞ а§Ха§Ња§Ѓ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В. а§≤а§Чৌ১ৌа§∞ ৙а•На§∞১а•На§ѓа•За§Х а§За§Ва§Ь৮ а§Ха•А ৶а•Ва§∞а•А а§Ха§Њ а§≤а§Ха•На§Ја•На§ѓ ৶а•Н৵ৌа§∞а§Њ а§Ьа§Ња§Ба§Ъ, а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§ђа§ња§≤а•На§Ха•Ба§≤ а§Ьа§ђ а§Ж৙ а§ѓа§є а§Ж৵৴а•На§ѓа§Х১ৌ ৮а•Аа§Ъа•З а§Іа•Аа§Ѓа§Њ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Ч১ড় а§Ха•З а§Ьа§Яа§ња§≤ а§Ча§£а§®а§Њ а§Ха§∞ ৐ড়৮ৌ, trajectories а§Фа§∞ а§Па§Ха•На§Єа•За§≤а§∞а•З৴৮.
(৮а•Ла§Я 6) а§Ѓа•За§В а§Єа§Ва§Єа•На§Ха§∞а§£ 5.0 а§Па§Ъа§Па§Па§≤ а§Еа§Ха•На§Ј ৪ু৮а•Н৵ৃ ৙а•Ва§∞а§Њ ৮৺а•Аа§В а§єа•Ба§Ж а§єа•И. ু৺১а•Н৵৙а•Ва§∞а•На§£ а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ца•Б৶ а§Ха§Њ а§Ца•На§ѓа§Ња§≤, а§єа§Ѓ а§За§Єа§≤а§ња§П а§Єа•Аа§П৮৪а•А Theremino а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч ৙а§∞ а§Іа•Нৃৌ৮ а§Ха•За§В৶а•На§∞ড়১ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В, а§Фа§∞ а§єа§Ѓ а§Ха•З৵а§≤ а§Еа§Ха•На§Ја•Ла§В ৪ু৮а•Н৵ৃ ৪ুৌ৙а•Н১ а§Ха§∞৮а•З а§Ха•З ৐ৌ৶.
(৮а•Ла§Я 7) а§Ѓа§Іа•Нৃ৵а§∞а•Н১а•А а§Єа•Н৕а§≤а•Ла§В а§Ха•Л а§∞а•Аа§Єа•За§Я а§Ха§∞ а§∞а§єа•З а§єа•Иа§В, а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 500-1000 а§ђа§Ња§∞ ৙а•На§∞১ড় а§Єа•За§Ха§Ва§°. а§Єа§ђа§Єа•З а§Еа§Ъа•На§Ыа§Њ а§∞а§Ња§Єа•Н১ৌ, а§≤а§Чৌ১ৌа§∞ recalculated а§єа•И. ৮ড়ৃа§В১а•На§∞а§£ а§Па§≤а•На§Ча•Ла§∞ড়৕а•На§Ѓ а§Цৌ১а•З а§Ѓа•За§В а§≤а•З১ৌ а§єа•И, ৵ৌ৪а•Н১৵ড়а§Х а§Єа•Н৕ড়১ড়ৃа•Ла§В а§Ха§Њ ৪ৌু৮ৌ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В ৙а•На§∞১а•На§ѓа•За§Х а§За§Ва§Ь৮ а§Фа§∞ а§Еа§Іа§ња§Х১ু ১а•Н৵а§∞а§£ а§Єа•З. а§єа§Ња§≤а§Ња§Ва§Ха§њ а§Єа•Аа§П৮৪а•А а§Ж৵а•З৶৮ а§Ча§≤১ ৙৕ а§Ха§Њ ৙а§∞а§ња§Ха§≤৮ а§Ха§∞১ৌ а§єа•И, а§Ж৙ а§Ха§ња§Єа•А а§≠а•А а§Ѓа§Ња§Ѓа§≤а•З а§Ѓа•За§В а§Ъа§∞а§£а•Ла§В а§Ца•Л а§Єа•З а§ђа§Ъ৮а•З а§Ха•З а§≤а§ња§П.
(৮а•Ла§Я 8) а§Жু১а•Ма§∞ ৙а§∞ а§Ж৙ ৶ৌа§≤ а§Ха•А а§Ъа•Ма§°а§Ља§Ња§И ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§єа•И (а§Єа•З Mach3 а§Ха•З ৪ৌ৕ 1 а§Ѓа•За§В 15 а§єа§Ѓа•За§В). а§ѓа§є а§Па§Х а§Ца§∞а§Ња§ђ а§Єа§Ѓа§Э а§єа•И а§Фа§∞ а§ѓа§є а§ђа•З১а§∞১а•Аа§ђ ৥а§Ва§Ч а§Єа•З а§Ха§И а§Й৙ৃа•Ла§Ча§Ха§∞а•Н১ৌа§Уа§В а§Ха•Л ৵ড়৮ড়ৃুড়১. а§Й৙ৃа•Ла§Ч ৵а•Нৃৌ৙а§Х ৶ৌа§≤а•Ла§В а§Ха•А а§Е৮а•Бু১ড় ৶а•З১ৌ а§єа•И а§За§≤а•За§Ха•На§Яа•На§∞а•Й৮ড়а§Х а§Й৙а§Ха§∞а§£а•Ла§В а§≤а•За§Ва§Є а§∞а§Ца§Ха§∞, а§Ха•Ба§Ы а§Ђа•Ла§Яа•Л-а§Х৙а•На§≤а§∞а•На§Є а§Ха•З а§∞а•В৙ а§Ѓа•За§В (а§Й৶ৌ৺а§∞а§£ а§Ха•З а§≤а§ња§П а§Єа§Єа•Н১а•З 4N25, 4N26 а§Фа§∞ 4N27). а§≤а•За§Хড়৮ а§Еа§Іа§ња§Х১ু ৙а•На§∞а§ѓа•Ла§Ч а§Ха§∞৮а•З а§ѓа•Ла§Ча•На§ѓ а§ђа•Иа§Ча•А а§Ж৵а•За§Ча•Ла§В а§Ха•Л ৙а•На§∞১ড়৐а§В৲ড়১. Theremino ৮ড়ৃু а§За§Є а§Єа§Ѓа§ѓ 50 а§єа§Ѓа•За§В (а§Єа•Ба§Єа•Н১ а§За§≤а•За§Ха•На§Яа•На§∞а•Й৮ড়а§Ха•На§Є а§Ха•З а§≤а§ња§П а§Іа•Аа§Ѓа•А ু৴а•А৮а•Ла§В а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ а§Ха•А а§Е৮а•Бু১ড়), ৃ৶ড় а§Ж৙ а§Йа§Ъа•На§Ъ а§Ч১ড় а§Фа§∞ microstep а§Ха•З а§Йа§Ъа•На§Ъ а§Ѓа•Ва§≤а•На§ѓа•Ла§В а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а•За§В а§≤а•За§Хড়৮ а§ѓа§є а§Єа•Н৵а§Ъа§Ња§≤ড়১ а§∞а•В৙ а§Єа•З а§Ха§Ѓ а§Ха§∞ ৶а•З১ৌ а§єа•И. а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 7.7 а§єа§Ѓа•За§В, а§Еа§Іа§ња§Х১ু а§Ж৵а•Г১а•Н১ড় а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞১а•З а§Єа§Ѓа§ѓ (65.535 KHz).
(৮а•Ла§Я 9) а§Е৮а•На§ѓ ৙а§≤а•На§Є а§Ь৮а§∞а•За§Яа§∞ а§Ха•З ৪ৌ৕ (а§Ьа•Иа§Єа•З Mach3) ৙а§≤а•На§Є а§Ха•З polarity ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙а§Ха•З ৙ৌ৪. а§ѓа§є а§Єа•За§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ а§Еа§Ча§∞ а§°а•На§∞а§Ња§З৵а§∞ а§Ха•Л ৐৥৊১а•А а§Па§Ь а§ѓа§Њ ৵а§В৴ ৙а§∞ а§Ха§Ња§∞а•На§ѓ а§Ха§∞১ৌ а§єа•И ৙১ৌ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П. а§ѓа§є а§Ьৌ৮а§Ха§Ња§∞а•А а§єа§Ѓа•З৴ৌ а§Й৙а§≤а§ђа•На§І ৮৺а•Аа§В а§єа•И а§Фа§∞ ৃ৶ড় а§Ж৙ а§За§Єа•З а§Ча§≤১ а§єа•Ба§Ж а§Ха§И ুৌৃ৮а•Ла§В ৺ৌ৮ড় а§Ъа§∞а§£ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§єа§Ња§Ьа§ња§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§ђа§єа•Б১ а§Ѓа•Б৴а•На§Ха§ња§≤. а§Єа•И৶а•На§Іа§Ња§В১ড়а§Х а§∞а•В৙ а§Єа•З а§Ча§≤১ ৪ৌু৮а•З а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Ха§ња§Єа•А а§≠а•А а§Єа§Ѓа§Єа•На§ѓа§Ња§Уа§В а§Ха•З а§Ха§Ња§∞а§£ ৮৺а•Аа§В а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П, а§Ха•На§ѓа•Ла§Ва§Ха§њ а§єа§∞ ৐৥৊১а•А ৐৥৊১ ৙а§∞, а§Па§Х а§Ча§ња§∞৮а•З ৐৥৊১ а§Ьа§∞а•Ва§∞а•А а§За§Є ৙а•На§∞а§Ха§Ња§∞ а§єа•И. а§≤а•За§Хড়৮, ৶ড়৴ৌ а§єа§Єа•Н১ৌа§Ха•На§Ја§∞ а§Ча§≤১ а§Єа§Ѓа§ѓ ৙а§∞ а§Е৶а•Нৃ১৮ а§Ха§ња§ѓа§Њ а§єа•И ১а•Л, а§Ъа§∞а§£а•Ла§В а§Ца•Л а§Єа§Х১а•З а§єа•Иа§В, а§ѓа§Њ а§Е১ড়а§∞а§ња§Ха•Н১ а§Х৶ু а§≤а•З. а§Ђа§∞а•Нু৵а•За§ѓа§∞ Theremino а§Ѓа§Ња§Єа•На§Яа§∞ а§Ха•А ৶а•За§Ца§≠а§Ња§≤ а§Ха•З ৪ৌ৕ ৶ড়৴ৌ а§Єа§Ва§Ха•З১ ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞১ৌ а§єа•И. а§Єа§Ва§Ха•З১ а§°а•На§∞а§Ња§З৵ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З а§≤а§ња§П а§≠а•А а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ (а§Па§Х а§Еа§≤а•Н৙৪а§Ва§Ца•На§ѓа§Х) а§Ча§ња§∞১а•З а§Хড়৮ৌа§∞а•З ৙а§∞ а§Еа§≠ড়৮ৃ. а§За§Є а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ а§Ха•Л ৮ৣа•На§Я а§Ха§∞৮а•З, ৙а•На§∞а§ѓа•Ла§Ч а§Ж৪ৌ৮ а§єа•И а§Фа§∞ а§Ъа§∞а§£а•Ла§В а§Ха•Л а§Ца•Л৮а•З а§Ха§Њ а§Ц১а§∞а§Њ ৪ুৌ৙а•Н১.
৙ড়৮ ৙а•На§∞а§Ха§Ња§∞ Stepper а§Па§Ъа§Па§Па§≤ а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч а§Ѓа•За§В а§Єа•За§Я а§Ха§∞а•За§В
৙а•На§∞১а•На§ѓа•За§Х stepper а§Ѓа•Ла§Яа§∞ ৶а•Л а§≠а•М১ড়а§Х ৙ড়৮ а§Ха•А а§Ьа§∞а•Ва§∞১, а§Па§Х а§Х৶ু а§Фа§∞ ৙а•На§∞а§ђа§В৲৮ а§Ха•З а§≤а§ња§П а§Па§Х. Microcontroller ৙ড়৮ а§Ца•Б৴а•А а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ьа§Ча§є а§єа•Ла§Ча•А, а§≤а•За§Хড়৮ а§єа§Ѓ а§≠а•На§∞а§Ѓ а§Ха•Л а§Єа•Аুড়১ а§Ха§∞৮а•З а§Ха§Њ а§Ђа•Иа§Єа§≤а§Њ а§Ха§ња§ѓа§Њ, ৙а•Ва§∞а•Н৵ ৮ড়а§∞а•На§Іа§Ња§∞ড়১ а§Єа•Н৕ড়১ড় ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Ха§∞৮а•З а§Ха•З ৶а•Н৵ৌа§∞а§Њ, ৙ড়৮-৙а•На§∞а§Ха§Ња§∞ Stepper а§Фа§∞ Stepper_Dir а§Ха•З а§≤а§ња§П.
৙ড়৮ ৙а•На§∞а§Ха§Ња§∞ Stepper а§Єа•З а§Ха§ња§Єа•А ুৌ৮ а§Ха•Л ৙৥৊৮ৌ, а§Ьа•Л а§ђа§Є а§Ча§В১৵а•На§ѓ а§Ѓа§ња§Ѓа•А а§Ѓа•За§В а§єа•И. а§Єа§∞а§≤ а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч, ৶а•Ва§∞ ৶а•Ва§∞ ১а§Х а§Ха•Ла§И а§Ча§В১৵а•На§ѓ ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Фа§∞ а§За§Єа•З а§Єа§≠а•А а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Ха§∞а•Л. а§Єа§ђа§Єа•З а§Ьа•Нৃৌ৶ৌ а§Ѓа§Ња§Ва§Ч а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В, а§Е৙৮а•З а§єа•А а§Ѓа§Ња§∞а•На§Ч а§Ха•А а§Ча§£а§®а§Њ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В а§Фа§∞ а§Еа§Ха•На§Єа§∞ а§Ѓа§Іа•Нৃ৵а§∞а•Н১а•А а§Єа•Н৕а§≤а•Ла§В а§≠а•За§Ьа•За§В. а§За§Є ১а§Х৮а•Аа§Х а§Ха•З ৪ৌ৕, а§Ха•Ла§И а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч а§Ха§Ња§Ѓ а§Ха•А а§Ч১ড় а§Ха•А а§Ьа§Ња§Ба§Ъ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В (а§Ђа§Ља•Аа§°), а§Фа§∞ ৆а•Аа§Х ৙৕ а§Ха§Њ ৮ড়а§∞а•На§Іа§Ња§∞а§£, а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§Ха§И а§Жа§ѓа§Ња§Ѓа•Ла§В а§Ѓа•За§В. а§ђа§Є ৮ড়а§∞а•На§ђа§Ња§І а§Ч১ড় ৙ৌ৮а•З а§Ха•З а§≤а§ња§П 20 ৙а•На§∞১ড় а§Єа•За§Ха§Ва§° а§Єа•Н৕а§≤а•Ла§В (а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 50 а§Єа§ђа§Єа•З а§Ьа•Нৃৌ৶ৌ а§Ѓа§Ња§Ва§Ч а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ха•З а§≤а§ња§П).
а§Па§Х а§Еа§Ха•На§Ј а§∞ড়৵а§∞а•На§Є:
а§Ха§ња§Єа•А а§Еа§Ха•На§Ј а§Ха•З а§Жа§В৶а•Ла§≤৮ а§Ха•А ৶ড়৴ৌ а§∞ড়৵а§∞а•На§Є а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, ৵а•З ুৌ৮а•Ла§В а§Єа•Н৵а•И৙ “1000” а§Фа§∞ “0”, а§ђа§Ха•На§Єа•З а§Ха•З “1000 ৪ৌ৲৮ а§Ѓа§ња§Ѓа•А” а§Фа§∞ “0 ৪ৌ৲৮ а§Ѓа§ња§Ѓа•А”.
৵ড়৴ড়ৣа•На§Я ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ ৙ড়৮ ৙а•На§∞а§Ха§Ња§∞ Stepper а§Ха•З:
а§Еа§Іа§ња§Х১ু а§Єа•Н৙а•Аа§° – а§ѓа§є а§Єа§ђа§Єа•З ১а•За§Ь а§Ч১ড় а§єа•И, а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В ৙а•На§∞১ড় ুড়৮а§Я. а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§≤а§Чৌ১ৌа§∞ а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§Ха•З ৶а•Н৵ৌа§∞а§Њ а§≠а•За§Ьа•З а§Ча§П а§Ча§В১৵а•На§ѓа•Ла§В а§Ьа§Ња§Ба§Ъ১ৌ а§єа•И. а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ ৙а•Ва§Ы а§∞а§єа§Њ а§єа•И, ১а•Л а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П а§ђа§єа•Б১ а§Ьа•Нৃৌ৶ৌ, а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Йа§Єа§Ха•А а§Ч১ড় а§Ха•Л ৙а•На§∞১ড়৐а§В৲ড়১ а§Ха§∞১ৌ а§єа•И, а§Ъа§∞а§£а•Ла§В а§Ха•Л а§Ца•Л৮а•З а§Єа•З а§ђа§Ъ৮а•З а§Ха•З а§≤а§ња§П. а§Ьа§ђ ১а§Х а§Ж৙ ৶а•За§Ц১а•З а§єа•Иа§В а§Ха§њ а§Ѓа•Ла§Яа§∞ а§Ъа§∞а§£а•Ла§В а§Ца•Л ৶а•За§Ва§Ча•З а§ѓа§є ুৌ৮ ৐৥৊ৌ (а§За§Єа§Єа•З а§Па§Х а§Йа§Ъа•На§Ъ а§Іа•Н৵৮ড় ৴а•Ла§∞ а§Фа§∞ а§ђа§В৶ а§єа•Л а§Ьৌ১ৌ а§єа•И) а§Фа§∞ ১৐ а§Єа•З а§ѓа§є а§Ха§Ѓа•А а§Па§Х 20..50%, а§Па§Х а§Єа•Ба§∞а§Ха•Нৣড়১ а§Ха•На§Ја•З১а•На§∞ а§Ха•З а§≤а§ња§П ৵ৌ৙৪ а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П. а§≤а•Ла§° а§Ха•З ১৺১ ৙а§∞а•Аа§Ха•На§Ја§£ ৶а•Ла§єа§∞а§Ња§Па§Б, а§ѓа§Њ а§Ѓа•И৮а•На§ѓа•Ба§Еа§≤ а§∞а•В৙ а§Єа•З а§ђа•На§∞а•За§Х а§≤а§Чৌ৮ৌ а§Ѓа•Ла§Яа§∞ ৶а•Н৵ৌа§∞а§Њ, ১а•Л а§Єа•Б৮ড়৴а•На§Ъড়১ а§Ха§∞а•За§В а§Ха§њ а§Ж৙а§Ха•З ৙ৌ৪ а§Ха•Ба§Ы а§Ха§Ѓа§∞а•З.
Max а§Па§Єа•Аа§Єа•А – а§ѓа§є а§Еа§Іа§ња§Х১ু ১а•Н৵а§∞а§£ а§єа•И (а§Фа§∞ а§Ѓа§В৶а•А), а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В ৙а•На§∞১ড় ুড়৮а§Я. а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§≤а§Чৌ১ৌа§∞ а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§Ха•З ৶а•Н৵ৌа§∞а§Њ а§≠а•За§Ьа•З а§Ча§П а§Ча§В১৵а•На§ѓа•Ла§В а§Ьа§Ња§Ба§Ъ১ৌ а§єа•И. а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ ৙а•Ва§Ы а§∞а§єа§Њ а§єа•И, ১а•Л а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П а§ђа§єа•Б১ а§Ьа•Нৃৌ৶ৌ, а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§За§Єа§Ха•А а§Ч১ড় а§Ха•Л ৙а•На§∞১ড়৐а§В৲ড়১ а§Ха§∞১ৌ а§єа•И, а§Ъа§∞а§£а•Ла§В а§Ха•Л а§Ца•Л৮а•З а§Єа•З а§ђа§Ъ৮а•З а§Ха•З а§≤а§ња§П. а§Ьа§ђ ১а§Х а§Ж৙ ৶а•За§Ц১а•З а§єа•Иа§В а§Ха§њ а§Ѓа•Ла§Яа§∞ а§Ъа§∞а§£а•Ла§В а§Ха•А ৶ড়৴ৌ ৙а§∞ড়৵а§∞а•Н১৮ а§Ха•З ৶а•Ма§∞ৌ৮ а§Ца•Л а§Ьа§Ња§Па§Ча§Њ а§ѓа§є ুৌ৮ ৐৥৊ৌ (а§За§Єа§Єа•З а§Па§Х а§Йа§Ъа•На§Ъ а§Іа•Н৵৮ড় ৴а•Ла§∞ а§Фа§∞ а§ђа§В৶ а§єа•Л а§Ьৌ১ৌ а§єа•И) а§Фа§∞ ১৐ а§Єа•З а§ѓа§є а§Ха§Ѓа•А а§Па§Х 20..50%, а§Па§Х а§Єа•Ба§∞а§Ха•Нৣড়১ а§Ха•На§Ја•З১а•На§∞ а§Ха•З а§≤а§ња§П ৵ৌ৙৪ а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П. а§≤а•Ла§° а§Ха•З ১৺১ ৙а§∞а•Аа§Ха•На§Ја§£ ৶а•Ла§єа§∞а§Ња§Па§Б, а§ѓа§Њ а§Ѓа•И৮а•На§ѓа•Ба§Еа§≤ а§∞а•В৙ а§Єа•З а§ђа•На§∞а•За§Х а§≤а§Чৌ৮ৌ а§Ѓа•Ла§Яа§∞ ৶а•Н৵ৌа§∞а§Њ, ১а•Л а§Єа•Б৮ড়৴а•На§Ъড়১ а§Ха§∞а•За§В а§Ха§њ а§Ж৙а§Ха•З ৙ৌ৪ а§Ха•Ба§Ы а§Ха§Ѓа§∞а•З.
а§Ѓа§ња§Ѓа•А а§Ха•З а§≤а§ња§П а§Ъа§∞а§£ – а§ѓа§єа§Ња§Б а§Ж৙ а§Ъа§∞а§£ а§Єа•За§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§єа•И, а§За§Ва§Ь৮ а§Ѓа•За§В а§Па§Х а§Єа•Н৙ড়৮ а§єа•И, microstep ৶а•Н৵ৌа§∞а§Њ а§Ча•Ба§£а§Њ, а§Ѓа•За§В ৮ড়ৃа§В১а•На§∞а§Х а§Єа•За§Я а§Ха§∞а•За§В, а§Фа§∞ а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В ৵ড়а§≠а§Ња§Ьড়১, а§Ѓа•Ла§Яа§∞ а§Ха•З а§∞а•Ла§Яа•З৴৮ а§Ха•З ৶а•Н৵ৌа§∞а§Њ а§Й১а•Н৙ৌ৶ড়১. ৃ৶ড় ৙а•На§∞১а•На§ѓа•За§Х а§Єа•Н৙ড়৮, а§Жа§В৶а•Ла§≤৮ а§Ха•А а§Па§Х а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ха§Њ а§Й১а•Н৙ৌ৶৮, а§Фа§∞ а§Па§Х 200 а§Х৶ু а§Ха•На§∞а§Ња§В১ড় ৙а•На§∞১ড় а§За§Ва§Ь৮ а§єа•И, а§Фа§∞ microstep а§Ха§Њ а§Й৙ৃа•Ла§Ч ৮ а§Ха§∞а•За§В, а§Йа§Єа§Ха•З ৐ৌ৶ а§Ж৙ ুৌ৮ а§Єа•За§Я: 200 (а§Ха•На§∞а§Ња§В১ড় ৙а•На§∞১ড় а§Ъа§∞а§£а•Ла§В) а§Па§Ха•На§Є 1 (microstep) / 1 (а§Ха•На§∞а§Ња§В১ড় ৙а•На§∞১ড় а§Ѓа§ња§Ѓа•А) = 200. а§Йа§Єа§Ха•З ৐ৌ৶ ১а•Л а§Єа•Ла§≤а§є microstep а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Ж৙ ুৌ৮ а§Єа•За§Я: 200 (а§Ха•На§∞а§Ња§В১ড় ৙а•На§∞১ড় а§Ъа§∞а§£а•Ла§В) а§Па§Ха•На§Є 16 (microstep) / 1 (а§Ха•На§∞а§Ња§В১ড় ৙а•На§∞১ড় а§Ѓа§ња§Ѓа•А) = 3200.
৙ড়а§Ыа§≤а•З а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§≤а§ња§Ва§Х – а§За§Є а§Ъа•За§Х а§ђа•Йа§Ха•На§Є а§Ха•Л а§Єа§Ха•На§Ја§Ѓ а§Ха§∞৮а•З а§Єа•З, а§Ѓа•Ла§Яа§∞ ৙ড়а§Ыа§≤а•З а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ьа•Ба§°а§Ља§Њ а§єа•Ба§Ж а§єа•И, а§Фа§∞ а§За§Єа§≤а§ња§П а§Па§Х ৙а•Ва§≤ а§Ха§Њ а§єа§ња§Єа•На§Єа§Њ а§єа•И, 2D tweens а§Ъа§≤ а§∞а§єа§Њ, 3D, 4D а§ѓа§Њ 5 d. ৐ড়৮ৌ а§За§Є ৙а•На§∞а§Ха•На§Ја•З৙, а§За§Ва§Ь৮ а§Ха§Ѓ а§Єа§°а§Ља§Х а§Ха•Ба§Ы а§Ха§∞৮а•З а§Ха•А а§Ьа§∞а•Ва§∞১, а§Ьа§≤а•Н৶а•А а§Ж৮а•З а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶ а§Ха§Њ ৙৕, а§Па§Х а§Яа•Ва§Яа•А а§єа•Ба§И а§≤а§Ња§З৮ а§єа•Ла§Ча§Њ, ৶а•Л а§ѓа§Њ а§Еа§Іа§ња§Х а§Ца§Ва§°а•Ла§В а§Ха•А а§∞а§Ъ৮ৌ. ৙а•На§∞а§Ха•На§Ја•З৙ а§Ха•Л а§Єа§Ха•На§Ја§Ѓ а§Ха§∞৮а•З а§Єа•З, а§Єа§≠а•А а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•А а§Ч১ড় ৪ু৮а•Н৵ড়১ а§єа•И, ১ৌа§Ха§њ ৵ৌ৪а•Н১৵ড়а§Х ৙а•На§∞а§Ха•На§Ја•З৙৵а§Ха•На§∞, а§Па§Х а§Єа•Аа§Іа•А а§∞а•За§Ца§Њ а§єа•И. а§За§Є ৪ু৮а•Н৵ৃ а§Ха§Њ а§≤а§Ња§≠ а§Й৆ৌ১а•З а§єа•Ба§П, ৮ড়ৃа§В১а•На§∞а§£ а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Ха•Ба§Ы а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В, а§Ха§Ња§Ђа•А а§Єа§∞а§≤ (а§Еа§Ха•На§Ј ৪ু৮а•Н৵ৃ а§Па§Ъа§Па§Па§≤ а§Ха•З ৵а§∞а•Н১ুৌ৮ а§Єа§Ва§Єа•На§Ха§∞а§£ а§Ѓа•За§В а§≤а§Ња§Ча•В ৮৺а•Аа§В а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ а§єа•И, а§Жа§Ча§Ња§Ѓа•А а§∞а§ња§≤а•Аа§Ь а§Ѓа•За§В а§Ц১а•На§Ѓ)
а§Ђа§Ља§∞৵а§∞а•А а§Е৶а•Нৃ১৮ 2015: ৴ৌৃ৶ а§ѓа§є ৵ড়а§Ха§≤а•Н৙ а§Ха•З а§∞а•В৙ а§Ѓа•За§В ু৺১а•Н৵৙а•Ва§∞а•На§£ ৮৺а•Аа§В а§єа•И, а§єа§Ѓ ৴а•Ба§∞а•Ба§Ж১ а§Ѓа•За§В а§Єа•Ла§Ъа§Њ а§Ха•З а§∞а•В৙ а§Ѓа•За§В. а§єа§Ѓ ৴ৌৃ৶ а§Е৮а•На§ѓ а§Ха§∞৮а•З а§Єа•З ৙৺а§≤а•З а§Еа§Іа§ња§Х а§Еа§єа§Ѓ ৙а§∞а§ња§ѓа•Ла§Ь৮ৌа§Уа§В ৪ুৌ৙а•Н১ а§єа•Ла§Ча§Њ. а§Єа§Ва§≠৵১: а§єа§Ѓа•За§В а§≤а§ња§Ца•За§В, ৃ৶ড় а§Ж৙ ১১а•На§Ха§Ња§≤ а§Ьа§∞а•Ва§∞১ а§єа•И.
৙ড়৮ ৙а•На§∞а§Ха§Ња§∞ Stepper_Dir а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха•Ла§И ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ ৮৺а•Аа§В а§єа•И. а§Ѓа•Иа§В а§Єа§ња§∞а•На§Ђ ৴ৌа§∞а•Аа§∞а§ња§Х а§Ха•З а§≤а§ња§П а§Па§Х ৙а•На§≤а•За§Єа§єа•Ла§≤а•На§°а§∞ а§єа•Ва§Б а§Жа§Йа§Я৙а•Ба§Я ৙ড়৮, а§Ѓа•Ла§Яа§∞ а§Ха•А ৶ড়৴ৌ а§Ха•А а§Єа•Н৕ৌ৙৮ৌ. а§ѓа§є ুৌ৮ а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৵৴а•На§ѓа§Х ৮৺а•Аа§В а§єа•И, а§Ха§њ а§ѓа•З ৙ড়৮ а§Єа•На§≤а•Йа§Я а§Ѓа•За§В а§≤а§ња§Ц а§∞а§єа•З а§єа•Иа§В, а§≤а•За§Хড়৮ а§Ха•Ба§Ы а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч а§За§Єа•З а§Й৙ৃа•Ла§Ча•А а§Ѓа§ња§≤ а§Єа§Х১а•А а§єа•И. а§Єа•На§≤а•Йа§Я а§Ѓа•За§В а§≤а§ња§Ца§Њ а§єа•И а§Ха§њ а§Ѓа•Ва§≤а•На§ѓ, а§Ча§В১৵а•На§ѓ а§Ха•З а§≤а§ња§П ৶а•Ва§∞а•А а§єа•И, а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В (а§Фа§∞ а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Па§Х а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ха•А а§Па§Х thousandth а§Ха•З а§Еа§В৴). а§ѓа§є а§Ьৌ৮а§Ха§Ња§∞а•А ৮ড়৶ৌ৮ а§Й৶а•Н৶а•З৴а•На§ѓа•Ла§В а§Ха•З а§≤а§ња§П а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ, а§ѓа§Њ а§Па§≤а•На§Ча•Ла§∞ড়৶ু а§Ха•З а§≤а§ња§П а§Ха§њ а§Па§Х ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Єа§єа§ња§Ја•На§£а•Б১ৌ а§Ха•Л ৙а•Ва§∞а§Њ а§Ха§∞৮ৌ а§єа•Ла§Ча§Њ. а§За§Є а§Ьৌ৮а§Ха§Ња§∞а•А а§Ха•З ৪ৌ৕ а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§ђа§В৶ а§≤а•В৙ а§Ха•З ৪ৌ৕ а§Фа§∞ а§єа§Ѓа•З৴ৌ а§Еа§Іа§ња§Х১ু а§Ч১ড় ৙а§∞ а§Ха§Ња§Ѓ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В. а§≤а§Чৌ১ৌа§∞ ৙а•На§∞১а•На§ѓа•За§Х а§За§Ва§Ь৮ а§Ха•А ৶а•Ва§∞а•А а§Ха§Њ а§≤а§Ха•На§Ја•На§ѓ ৶а•Н৵ৌа§∞а§Њ а§Ьа§Ња§Ба§Ъ, а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§ђа§ња§≤а•На§Ха•Ба§≤ а§Ьа§ђ а§Ж৙ а§ѓа§є а§Ж৵৴а•На§ѓа§Х১ৌ ৮а•Аа§Ъа•З а§Іа•Аа§Ѓа§Њ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Ч১ড় а§Ха•З а§Ьа§Яа§ња§≤ а§Ча§£а§®а§Њ а§Ха§∞ ৐ড়৮ৌ, trajectories а§Фа§∞ а§Па§Ха•На§Єа•За§≤а§∞а•З৴৮.
৙ড়৮ а§Ха§Њ ৵ড়৵а§∞а§£ ৶а•За§Ца•За§В

৙ড়৮ ৵ড়৵а§∞а§£ ৶ড়а§Ца§Ња§Па§Б ১а•Н৵а§∞а§£ and ৴а•Аа§∞а•На§Ј а§Єа•Н৙а•Аа§° а§Ѓа•За§В а§єа§∞а•На§Яа•На§Ь (৙а•На§∞১ড় а§Єа•За§Ха§Ва§° а§Ъа§∞а§£а•Ла§В). а§ѓа•З ুৌ৮ а§°а§ња§Ьа§Ња§З৮ а§За§≤а•За§Ха•На§Яа•На§∞а•Й৮ড়а§Ха•На§Є а§Ха•З а§≤а§ња§П а§Й৙ৃа•Ла§Ча•А а§єа•Л১а•З а§єа•Иа§В, ৙а§∞а•Аа§Ха•На§Ја§£ а§Ха•З ৶а•Ма§∞ৌ৮ а§Фа§∞ а§Хড়১৮а•З а§Ѓа§Ња§За§Ха•На§∞а•Л-а§Ъа§∞а§£ а§Й৙ৃа•Ла§Ч а§ѓа§є ৮ড়а§∞а•На§Іа§Ња§∞ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П. а§Ха•Ба§Ы а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В, а§ѓа§є а§Ха§ња§Єа•А ৮ а§Ха§ња§Єа•А а§≤а§Ха•На§Ја•На§ѓ ৙১ৌ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Й৙ৃа•Ла§Ча•А а§єа•Л а§Єа§Х১ৌ а§єа•И (а§Ъа§∞а§£а•Ла§В а§Ѓа•За§В), а§Ча§В১৵а•На§ѓ а§Єа•Н৕ৌ৮ ৙а§∞ а§Ѓа§ња§Ѓа•А а§Ѓа•За§В.
а§Ж৵а•З৶৮ а§Ѓа•За§В а§Па§Ъа§Па§Па§≤, ৙ড়৮ а§Ха•З а§≤а§Ња§З৮ ৙а§∞ а§°а§ђа§≤ а§Ха•На§≤а§ња§Х а§Ха§∞а•За§В (Stepper а§Ха•З ৙а•На§∞а§Ха§Ња§∞). ৶а•Ва§Єа§∞а•А ৵ড়а§Ва§°а•Л а§Ѓа•За§В, ১а§≤ ৙а§∞, а§Ж৙ а§Ъৃ৮ড়১ ৙ড়৮ а§Ха•З ৵ড়৵а§∞а§£ ৙৥৊а•За§В. а§Па§Х а§ђа§°а§Ља§Њ ৶а•За§Ц৮а•З а§Ха•З а§≤а§ња§П а§Ы৵ড় ৙а§∞ а§Ха•На§≤а§ња§Х а§Ха§∞а•За§В.
а§Ж৵а•За§Ча•Ла§В а§Ха•А а§Єа§Яа•Аа§Х১ৌ ৶ড়а§Ца§Њ ৵а•Аа§°а§ња§ѓа•Л а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§Ѓа§Ња§Єа•На§Яа§∞ ৶а•Н৵ৌа§∞а§Њ а§Й১а•Н৙ৌ৶ড়১, Mach3 а§Єа•З


а§ѓа•Ва§Яа•На§ѓа•Ва§ђ ৙а§∞ ৵а•Аа§°а§ња§ѓа•Л:
http://www.youtube.com/embed/CeC5WD4866o?fs=1&rel=0&loop=1&hd=1&autoplay=1
а§За§Є ৵а•Аа§°а§ња§ѓа•Л а§Ѓа•За§В а§єа§Ѓ ৶а•За§Ц১а•З а§єа•Иа§В а§Єа§Ѓа§ѓ а§Ха•З ৪ৌ৕ а§Єа§ња§Ца§Ња§И, а§Па§Х а§Ж৵а•За§Ч а§Ха•З а§ђа•Аа§Ъ а§Е৵৲ড় а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶. ৶а•Л ৵а•Аа§°а§ња§ѓа•Л а§Ха•З ৙а•Иুৌ৮а•З ৙а§∞ а§Па§Х а§єа•А а§єа•И, 100 ৵а§∞а•На§Ч а§Ха•З а§≤а§ња§П NS. Theremino а§Ѓа§Ња§Єа•На§Яа§∞ ৶ৌа§≤а•Ла§В а§Ха§Њ а§Й১а•Н৙ৌ৶৮, ৪ৌ৕ а§єа•А а§Ха•А а§Па§Х ৙а§∞а•На§Ъа•А 20 ৮а•И৮а•Л а§Єа•За§Ха§Ва§°. а§За§Єа§Ха•З а§ђа§Ьа§Ња§ѓ а§≤а§Чৌ১ৌа§∞ Mach3 а§Єа•З а§Еа§Іа§ња§Х а§єа•И 2 а§Ѓа§Ња§За§Ха•На§∞а•Л а§Єа•За§Ха§Ва§° а§Фа§∞ а§Єа§ђа§Єа•З а§Ца§∞а§Ња§ђ а§Ха•На§Ја§£а•Ла§В а§Ѓа•За§В а§Ж৮а•З а§Ха•З а§≤а§ња§П 10 а§Ѓа§Ња§За§Ха•На§∞а•Л а§Єа•За§Ха§Ва§°. ৃ৶ড় а§Ж৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৃৌ১а•На§∞а§Њ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В 25 KHz, Theremino а§Ча•Ба§∞а•Б а§Ха•А а§Єа§ња§Ца§Ња§И а§єа•И а§Ха•З৵а§≤ 0.05%, а§Ьа§ђа§Ха§њ Mach3 а§Ха•З а§ђа§∞а§Ња§ђа§∞ а§єа•И 25%. а§Ьа§ђ а§Ж৙ а§Єа•З а§Еа§Іа§ња§Х а§єа•Л 10% stepper а§Ѓа•Ла§Яа§∞а•На§Є ৙а•Аৰ৊ড়১ а§єа•Иа§В а§Фа§∞ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৴а•Ба§∞а•Ба§Ж১ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В а§Ъа§∞а§£а•Ла§В а§Ца•Л. Jittering Mach3 а§Іа•Аа§Ѓа•А ু৴а•А৮а•Ла§В а§Ѓа•За§В ৺ৌ৮ড়а§∞৺ড়১ а§єа•И а§Фа§∞ а§Ѓа§Ња§За§Ха•На§∞а•Л-а§Ъа§∞а§£а•Ла§В а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а•За§В, а§Єа•Н৕ড়১ড় а§Ѓа•За§В а§Єа•Ба§Іа§Ња§∞ а§Ха§∞১ৌ а§єа•И. а§Єа§≠а•А а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В, ১৕ৌ৙ড়,, а§Ха•А а§Й৙৪а•Н৕ড়১ড় а§Ѓа•За§В а§Ша§ђа§∞ৌ৮ৌ, а§Ж৙ а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Ѓа•За§В а§Ха§Ѓа•А а§Ха§∞৮ৌ а§єа•Ла§Ча§Њ. а§Еа§Іа§ња§Х а§Ьৌ৮а§Ха§Ња§∞а•А а§Ха•З а§≤а§ња§П, а§Єа§Ѓа§ѓ а§Ха•З ১ৌа§≤а§Ѓа•За§≤ а§Єа•З Mach3 ৶а•Ла§Ј (а§Фа§∞ LinuxCNC а§Ха•З ৶а•Ла§Ја•Ла§В ৙а§∞ а§≠а•А ৐৶১а§∞ – EMC2), ৙৥৊а•За§В а§ѓа§є а§Жа§≤а•За§Ц а§Фа§∞ ৵ড়৴а•За§Ј а§∞а•В৙ а§Єа•З ৶а•За§Ца•Л l’а§Ы৵ড় а§За§Є ৙а•Га§Ја•Н৆ а§Ха•З ১а§≤ ৙а§∞.
а§Ъа§Ња§В৶ৌ stepper а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З а§≤а§ња§П
 а§Єа§єа•А а§Ѓа§Ња§Йа§Є а§ђа§Я৮ а§Ха•З ৪ৌ৕ а§Ы৵ড় а§°а§Ња§Й৮а§≤а•Ла§° а§Ха§∞а•За§В.
а§Єа§єа•А а§Ѓа§Ња§Йа§Є а§ђа§Я৮ а§Ха•З ৪ৌ৕ а§Ы৵ড় а§°а§Ња§Й৮а§≤а•Ла§° а§Ха§∞а•За§В.
৶а•Н৵ৌа§∞а§Њ а§За§Є а§Ъа§Ња§В৶ৌ 200 а§Ъа§∞а§£а•Ла§В (1.8 а§Х৶ু ৙а•На§∞১ড় а§°а§ња§Ча•На§∞а•А), а§ѓа§є а§Ха§Ња§∞а•На§∞৵ৌа§И а§Ха•Л ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Й৙ৃа•Ла§Ча•А а§єа•И, stepper а§Ѓа•Ла§Яа§∞а•На§Є. а§єа§Ѓ ৵а•За§ђ ৙а§∞ а§≤а§Ва§ђа•З а§Єа§Ѓа§ѓ а§Ха•А а§Ѓа§Ња§Ва§Ч а§Ха•А а§єа•И, а§Фа§∞ а§Еа§В১ а§Ѓа•За§В а§єа§Ѓ а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П а§єа§Ѓа•За§В ৕ৌ. ৵а§∞а•Н১ুৌ৮ а§Ѓа•Б৶а•На§∞а§£ а§Жа§Ха§Ња§∞ (75 а§Па§Ха•На§Є 75 а§Ѓа§ња§Ѓа•А) Nema а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З а§≤а§ња§П а§Ха§∞ а§∞а§єа•З а§єа•Иа§В 23. а§Жа§∞а•За§Ца§£ а§Ха•З а§≤а§ња§П а§Па§Х ৙а•На§∞а•Ла§Ча•На§∞а§Ња§Ѓ а§Ха•З ৪ৌ৕, а§ѓа§Њ ৙а•На§∞а§ња§Ва§Яа§∞ а§Єа•За§Яа§ња§Ва§Ча•На§Є а§Ха•З ৪ৌ৕, а§Ж৙ а§Жа§Ха§Ња§∞ а§Ха•Л а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Ыа•Ла§Яа•З а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П, а§ѓа§Њ а§ђа§°а§Ља§Њ. а§Ъа§Ња§В৶ৌ а§Ѓа•Б৶а•На§∞ড়১ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ, а§Па§Х inkjet ৙а•На§∞а§ња§Ва§Яа§∞ а§Ха•З ৪ৌ৕, а§Ха§Ња§∞а•На§°а§ђа•Ла§∞а•На§° ৙а§∞.
Goniometer Theremino а§Єа•Аа§П৮৪а•А а§єа•Иа§Х

а§єа§Ѓ GCode а§Ѓа•За§В goniometer а§Ха•А а§Ы৵ড় ৐৶а§≤ ৶ড়ৃৌ а§єа•И (а§Ха•З ৪ৌ৕ “Theremino ImgToGcode“). GCode а§Ха•З а§ђа•Аа§Ъ а§єа•И “৮а§Ха•На§Хৌ৴а•А а§Ха•З а§Й৶ৌ৺а§∞а§£”, Theremino а§Єа•Аа§П৮৪а•А, а§Фа§∞ а§ѓа§є а§Ха§єа§Њ а§Ьৌ১ৌ а§єа•И “StepperMotor а§Ъа§Ња§В৶ৌ gc”.
а§Па§Х а§Жа§Іа§Ња§∞ а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§єа§Ѓ а§Е৮а•Б৴а§Ва§Єа§Њ а§Ха§∞১а•З а§єа•Иа§В plexiglas, а§ѓа§Њ а§∞а§Ва§Ча•А৮ ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х.
а§Еа§Іа§ња§Х১ু ৙а•На§∞৶а§∞а•Н৴৮ ৙а•На§∞ৌ৙а•Н১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, ৙১а§≤а•А ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х а§Ха•А а§Па§Х ৴а•Аа§Я а§Ча•Ла§В৶, а§Па§Х а§Ѓа•Ла§Яа•А а§Ъৌ৶а§∞ ৙а§∞, а§Еа§≤а§Ч а§Еа§≤а§Ч а§∞а§Ва§Ч а§Фа§∞ а§Еа§Єа§∞ а§Ха•З৵а§≤ ৴а•Аа§∞а•На§Ј ৙১а•На§∞а§Х.
Stepper а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З а§≤а§ња§П а§Е৮а•Б৴а§Ва§Єа§Ња§Па§Б
а§За§Ва§Ь৮ а§Єа•З а§ђа§Ъа•За§В а§Ха§њ а§Па§Х а§ђа•Б৮ড়ৃৌ৶а•А ৪ড়৶а•На§Іа§Ња§В১ а§Ха•З а§∞а•В৙ а§Ѓа•За§В “sgranino” (১а•Ба§Ѓ а§Єа•Б৮ а§Па§Х “৮১ৌ৴ৌ” а§Фа§∞ а§За§Ва§Ь৮ а§Єа§Ва§ѓа§В১а•На§∞). а§Еа§Ча§∞ а§Па§Х а§За§Ва§Ь৮ а§Ха•З а§Ча•Ла§≤а•З workpiece ৶а•Вৣড়১ а§єа•Л а§Ьৌ১ৌ а§єа•И. ৵ৌ৙৪ а§Ьа§Ња§У а§Фа§∞ а§Яа•Ба§Ха§°а§Ља§Њ а§Ђа•За§Ва§Х а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха•Ла§И ১а§∞а•Аа§Ха§Њ ৮৺а•Аа§В а§єа•И. ু৴а•А৮ а§Єа§Ѓа§ѓ а§Ха•З а§Ша§Ва§Яа•З а§Ца•Л৮а•З а§Ха•З а§Еа§≤ৌ৵ৌ а§Ж৙ а§Єа•За§Ѓа•Аа§Ђа§Ња§З৮а§≤ а§єа§Ња§∞.
а§Ж৙ ৃৌ৶ ৮৺а•Аа§В а§єа•И а§Єа•Б৮ড়৴а•На§Ъড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৶ু ১а•Л а§Жа§Ча•З ৐৥৊৮ৌ: ৙а•На§∞১а•На§ѓа•За§Х а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ а§Ѓа•За§В ৵а•Г৶а•На§Іа§њ, а§Па§Х а§Єа§Ѓа§ѓ а§Ѓа•За§В а§Па§Х, а§За§Ва§Ь৮ а§Ха•З а§Ча•Ла§≤а•З ১а§Х а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶ а§Па§Х ৵ৌ৙৪ а§Ьа§Ња§У 30%, а§ѓа§Њ а§≠а•А 50% а§Єа•Ба§∞а§Ха•Нৣড়১ ৙а§Ха•На§Ј ৙а§∞ а§єа•Л৮ৌ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П. ৮ড়ৃুа•Ла§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В: а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Фа§∞ ১а•Н৵а§∞а§£ (Nell вАЩ а§Па§Ъа§Па§Па§≤). а§Е৮а•Ба§Ха•Ва§≤১ু ৙а•На§∞৶а§∞а•Н৴৮ а§Ха•З а§≤а§ња§П а§Ж৙ а§≠а•А а§Ъа§Ња§≤а•В а§Ѓа•Ла§Яа§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П (а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§°а•На§∞а§Ња§З৵а§∞ ৙а§∞ а§Ха•Ла§И trimmer). а§Ыа•Ла§Яа•З а§Яа•На§∞а§ња§Ѓа§∞ а§Па§Х а§Й৙ৃа•Ба§Ха•Н১ а§Па§Х ৙а•На§∞а§Ха§Ња§∞ а§Ха§Њ ৴а§∞а§Ња§ђа•А а§Ха•З ৪ৌ৕ а§Фа§∞ а§ђа§єа•Б১ ৪ৌ৵৲ৌ৮а•А а§Єа•З а§Ча•Ла§≤а•А а§Ѓа§Ња§∞ ৶а•З৮а•А а§Ъа§Ња§єа§ња§П. ৃ৶ড় ৙а•За§Ъа§Х৴ а§ђа§Ъ а§Фа§∞ а§Па§Х ৴а•Йа§∞а•На§Я а§Єа§∞а•На§Ха§ња§Я ৐৮ৌ১ৌ а§єа•И, а§°а•На§∞а§Ња§З৵а§∞ ১а•Ба§∞৮а•Н১ а§Ђа•На§∞а§Ња§За§Ьа§Љ (а§Фа§∞ а§Ха§≠а•А а§Ха§≠а•А а§ђа§Ња§єа§∞ а§Яа•Ва§Я).
а§Ъа§Ња§≤а§Х ৙а§∞а§Ѓа§ња§Я ১а•Л а§єа§Ѓа•З৴ৌ а§Ѓа§Ња§За§Ха•На§∞а•Л-а§Ъа§∞а§£а•Ла§В а§Ѓа•За§В а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•За§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Еа§Ъа•На§Ыа§Њ а§єа•И 4. а§Ѓа§Ьа§ђа•В১ а§Ха§В৙৮ ৙а•И৶ৌ а§Ха§∞১ৌ а§єа•И а§Еа§Ча§∞ а§Ж৙ а§Ѓа§Ња§За§Ха•На§∞а•Л-а§Ъа§∞а§£ а§Ѓа•Ла§Яа§∞ а§Ха§Њ а§Й৙ৃа•Ла§Ч ৮ а§Ха§∞а•За§В. а§ѓа§Ња§В১а•На§∞а§ња§Х а§Е৮а•Б৮ৌ৶а•Ла§В, а§Ха§В৙৮ ৶а•Н৵ৌа§∞а§Њ а§Яа•На§∞а§ња§Ча§∞ а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ, а§Ж৙ а§ђа§єа•Б১ а§Ха§Ѓ а§Ч১ড় ৙а§∞ а§≠а•А а§Ъа§∞а§£а•Ла§В а§Ца•Л৮а•З а§Ха•З а§≤а§ња§П а§Ха§Ња§∞а§£ а§єа•Л а§Єа§Х১а•З а§єа•Иа§В. а§За§Єа§Єа•З а§ђа§Ъ৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ а§Ъа§Ња§≤а•В а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ѓа•Ла§Яа§∞ а§Ѓа•За§В ৵а•Г৶а•На§Іа§њ а§Ха§∞৮а•А а§Ъа§Ња§єа§ња§П, а§≤а•За§Хড়৮ а§ѓа§є а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Єа•Аа§Ѓа§Њ а§єа•Л১а•А а§єа•И.
а§ѓа§Ња§В১а•На§∞а§ња§Х а§Ша§∞а•На§Ја§£ а§Ха•Л а§Єа•Аুড়১ а§Ха§∞৮а•З а§Фа§∞ а§Е৙а§∞а§ња§єа§Ња§∞а•На§ѓ а§Ыа•Ла§Яа•З а§ђа§В৶-а§Еа§Ха•На§Ј ১а•На§∞а•Ба§Яа§ња§ѓа•Ла§В а§Ха•З а§Ха§Ња§∞а§£ ৙а•На§∞а§ѓа§Ња§Єа•Ла§В а§Єа•З а§За§Ва§Ь৮ а§Ха•Л а§∞а•Ла§Х৮а•З а§Ха•З а§≤а§ња§П а§≤а§Ъа•Аа§≤а§Њ а§Х৙а§≤а§ња§Ва§Ч а§Ьа•Ла§°а§Љ. а§За§Єа§Ха•З а§Еа§≤ৌ৵ৌ а§Х৙а§≤а§ња§Ва§Ч ু৴а•А৮ а§Ха•З а§ѓа§Ња§В১а•На§∞а§ња§Х а§≠а§Ња§Ча•Ла§В а§Ха•З а§Е৮а•Б৮ৌ৶а•Ла§В а§Єа•З а§За§Ва§Ь৮ decoupling а§єа•Иа§В. а§Фа§∞ ৮ড়: ৴а•Ба§≤а•На§Х а§Ѓа•Ла§Яа§∞ а§Ъа§≤১ৌ а§єа•И а§ѓа§Ња§В১а•На§∞а§ња§Ха•А а§Еа§Ъа•На§Ыа•А ১а§∞а§є а§Єа•З ৐৮ৌ а§∞а§єа•З а§єа•Иа§В, ১а•Л, ৵а§∞а•Н১ুৌ৮ а§Ха§Ѓ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ а§Фа§∞ ৵৺ а§єа§Ѓа•З৴ৌ а§Па§Х а§Єа•З а§Еа§Іа§ња§Х а§єа•И.
৵а§∞а•Н১ুৌ৮ а§Ха•Л а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§Ѓа•Ла§Яа§∞ ৙а§∞ а§ѓа§є ু৺১а•Н৵৙а•Ва§∞а•На§£ а§єа•И. а§Ж৙ а§Еа§Іа§ња§Х১ু ৵а§∞а•Н১ুৌ৮ ৮৺а•Аа§В а§Єа•За§Я а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П! ৮ড়а§∞а•Нুৌ১ৌ ৶а•Н৵ৌа§∞а§Њ ৮ড়а§∞а•Н৶ড়ৣа•На§Я ৵а§∞а•Н১ুৌ৮ ৴а§Ха•Н১ড় а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙а§Ха•З ৙ৌ৪ ৮৺а•Аа§В а§єа•И. а§≤а•За§Хড়৮ а§ѓа§є а§Еа§Іа§ња§Х১ু ৵а§∞а•Н১ুৌ৮ а§єа•И, а§Єа•З ৙а§∞а•З а§єа•И а§Ьа•Л а§За§Ва§Ь৮ а§Ча§∞а•На§Ѓа•А а§З১৮а•А а§Ьа•Нৃৌ৶ৌ а§ђа§∞а•Н৐ৌ৶ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П. ৵а§∞а•Н১ুৌ৮ а§Ха§Ња§∞а•На§ѓ а§Ха•Л а§Ха§Ѓ а§Ха§∞৮а•З, а§Ха§В৙৮ а§Ха•Л ৮а•На§ѓа•В৮১ু а§Фа§∞ а§Еа§Іа§ња§Х১ু а§Ч১ড় ৐৥৊ а§Ьৌ১а•А а§єа•И. а§Й১а•Н১ু а§Ж৙а§∞а•За§Яа§ња§Ва§Ч ৵а§∞а•Н১ুৌ৮, а§ѓа§є а§Жু১а•Ма§∞ ৙а§∞ а§Ѓа•Ла§Яа§∞ ৙а§∞ ৶ড়а§Ца§Ња§ѓа§Њ а§Ча§ѓа§Њ а§єа•И а§Ха§њ а§Па§Х а§Ъа•М৕ৌа§И а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В а§єа•И.
а§Ѓа§Ьа§ђа•В১ а§Ша§∞а•На§Ја§£ а§Ха•А а§Й৙৪а•Н৕ড়১ড় а§Ѓа•За§В а§єа§Ѓ ৵а§∞а•Н১ুৌ৮ а§Ѓа•За§В ৵а•Г৶а•На§Іа§њ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ѓа§Ьа§ђа•Ва§∞ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В. а§≤а•За§Хড়৮ а§За§Є ৵а•Г৶а•На§Іа§њ а§Па§Х а§≤а§Ња§≠৶ৌৃа§Х ৙а•На§∞а§≠ৌ৵ а§єа•И, а§Ха§Ѓ а§Ч১ড় ৙а§∞ а§Ха•З৵а§≤. а§Йа§Ъа•На§Ъ а§Ч১ড় ৙а§∞ а§Ж৙ а§Єа•Ба§Іа§Ња§∞ ৮৺а•Аа§В а§Ѓа§ња§≤১ৌ. ৶а§∞а§Еа§Єа§≤, ৶а•Ва§∞а•А ৐৥৊ а§Ьৌ১а•А а§єа•И а§Фа§∞ а§Ж৙ а§Ха•Л а§Ца•Л৮а•З а§Ха§Њ а§Ц১а§∞а§Њ а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Єа•Аুড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ѓа§Ьа§ђа•Ва§∞ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В.
а§Єа•На§Яа•З৙а§∞ а§Ха•З а§≤а§ња§П а§°а•На§∞а§Ња§З৵а§∞а•На§Є
а§Єа•На§Яа•З৙а§∞ а§Ца§ња§≤а§Ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ а§Єа•Аа§Іа•З а§∞а•В৙ а§Ѓа•За§В а§Ж৙ а§Ха•З ৪ৌ৕ а§Єа§∞а•Н৵а•Л. а§Ж৙ а§Па§Х а§°а•На§∞а§Ња§З৵а§∞ а§Ьа•Лৰ৊৮а•З а§Ъа§Ња§єа§ња§П. а§єа§Ѓ а§Е৮а•Б৴а§Ва§Єа§Њ а§Ха§∞১а•З а§єа•Иа§В а§Ха§њ а§Ж৙ а§Па§Ха•Аа§Ха•Г১ SA1042 а§Ьড়৮ুа•За§В ৙а•Ба§∞ৌ৮а•З а§°а§ња§Ьа§Ња§З৮ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Єа•З а§ђа§Ъ৮а•З, SA1027, Uln2003, L297 а§Фа§∞ а§За§Єа•А ১а§∞а§є. а§Єа§ђа§Єа•З а§Еа§Ъа•На§Ыа§Њ а§°а•На§∞а§Ња§З৵а§∞ A4988 а§Ъড়৙а•На§Є Allegro ৶а•Н৵ৌа§∞а§Њ а§Й১а•Н৙ৌ৶ড়১ а§єа•Л.
A4988 а§Ха•А а§Еа§Іа§ња§Х১ু ৵а•Ла§≤а•На§Яа•За§Ь а§єа•И 35 ৵а•Ла§≤а•На§Я (১а•Л а§ѓа§є а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Й৮а•На§єа•За§В а§Ца§ња§≤ৌ৮а•З а§Ха•З а§≤а§ња§П а§Е৮а•Б৴а§В৪ড়১ а§єа•И 24 ৵а•Ла§≤а•На§Я) а§Фа§∞ а§Еа§Іа§ња§Х১ু ৵а§∞а•Н১ুৌ৮ а§єа•И 2 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ (а§≤а•За§Хড়৮ а§За§Є а§Ѓа§Ња§Ѓа§≤а•З а§Ѓа•За§В а§ѓа§є а§≤а•З১ৌ а§єа•И а§Па§Х а§Ча§∞а•На§Ѓа•А а§Єа§ња§Ва§Х а§Фа§∞ ৺৵ৌ а§Єа•З а§Йа§°а§Љ а§∞а§єа§Њ ৕ৌ а§Па§Х ৙а•На§∞৴а§Ва§Єа§Х вАЩ а§Єа§≠а•А а§°а•На§∞а§Ња§З৵а§∞а•Ла§В ৙а§∞ а§Йа§Ъа•На§Ъ)
 а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§За§Ва§Ь৮ ৶а•Н৵ৌа§∞а§Њ ৪৺৮а•З а§ѓа•Ла§Ча•На§ѓ ৵а§∞а•Н১ুৌ৮ а§Еа§Іа§ња§Х১ু а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ ৮৺а•Аа§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В!!! а§Єа§ђа§Єа•З ৵а§∞а•Н১ুৌ৮ а§Ѓа•Ла§Яа§∞ ৙а§∞ ৶ড়а§Ца§Ња§ѓа§Њ а§Ча§ѓа§Њ а§єа•И, а§Ѓа•Ла§Яа§∞а•На§Є а§Єа•З ৙а§∞а•З а§Ьа•Л ৮а•Ба§Х৪ৌ৮ а§єа•Ла§Ча§Њ!
а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§За§Ва§Ь৮ ৶а•Н৵ৌа§∞а§Њ ৪৺৮а•З а§ѓа•Ла§Ча•На§ѓ ৵а§∞а•Н১ুৌ৮ а§Еа§Іа§ња§Х১ু а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ ৮৺а•Аа§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В!!! а§Єа§ђа§Єа•З ৵а§∞а•Н১ুৌ৮ а§Ѓа•Ла§Яа§∞ ৙а§∞ ৶ড়а§Ца§Ња§ѓа§Њ а§Ча§ѓа§Њ а§єа•И, а§Ѓа•Ла§Яа§∞а•На§Є а§Єа•З ৙а§∞а•З а§Ьа•Л ৮а•Ба§Х৪ৌ৮ а§єа•Ла§Ча§Њ!
ৃ৶ড় а§За§Ва§Ь৮ а§Єа•З а§Ха§∞ а§∞а§єа•З а§єа•Иа§В 1 а§Йа§Єа§Ха•З ৐ৌ৶ ৵а§∞а•Н১ুৌ৮ а§Па§Ѓа•Н৙а•Аа§ѓа§∞ а§Ха§Њ а§Еа§Іа§ња§Ха§Ња§∞ а§єа•И 250 а§≤а•За§Хড়৮ а§Фа§∞ 500 а§≤а•За§Хড়৮. а§За§Ва§Ь৮ а§З১৮а•А а§Ча§∞а•На§Ѓа•А ৮৺а•Аа§В а§Ха§∞১ৌ а§єа•И, а§°а•На§∞а§Ња§З৵а§∞ ৕а•Ла§°а§Ља§Њ а§Ча§∞а•На§Ѓа•А а§Фа§∞ а§Еа§Іа§ња§Х১ু а§Ч১ড় ৐৥৊ а§Ьৌ১а•А а§єа•И.
৵а§∞а•Н১ুৌ৮ а§Ха§Ѓ ৕а•Ла§°а§Ља§Њ а§Ха§Ѓ а§єа•Л а§Ьৌ১ৌ а§єа•И’ а§ѓа•Ба§Ча§≤, а§≤а•За§Хড়৮ а§За§Ва§Ь৮ а§Ъа§ња§Х৮а•А а§Ъа§≤ৌ৮а•З а§Ха•З а§≤а§ња§П а§Фа§∞ а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Єа•З а§Еа§Іа§ња§Х а§Ха•А а§Е৮а•Бু১ড় ৶а•За§В, а§Ча•Ла§≤а§Ња§ђа§Ња§∞а•А а§Єа•З ৙৺а§≤а•З.
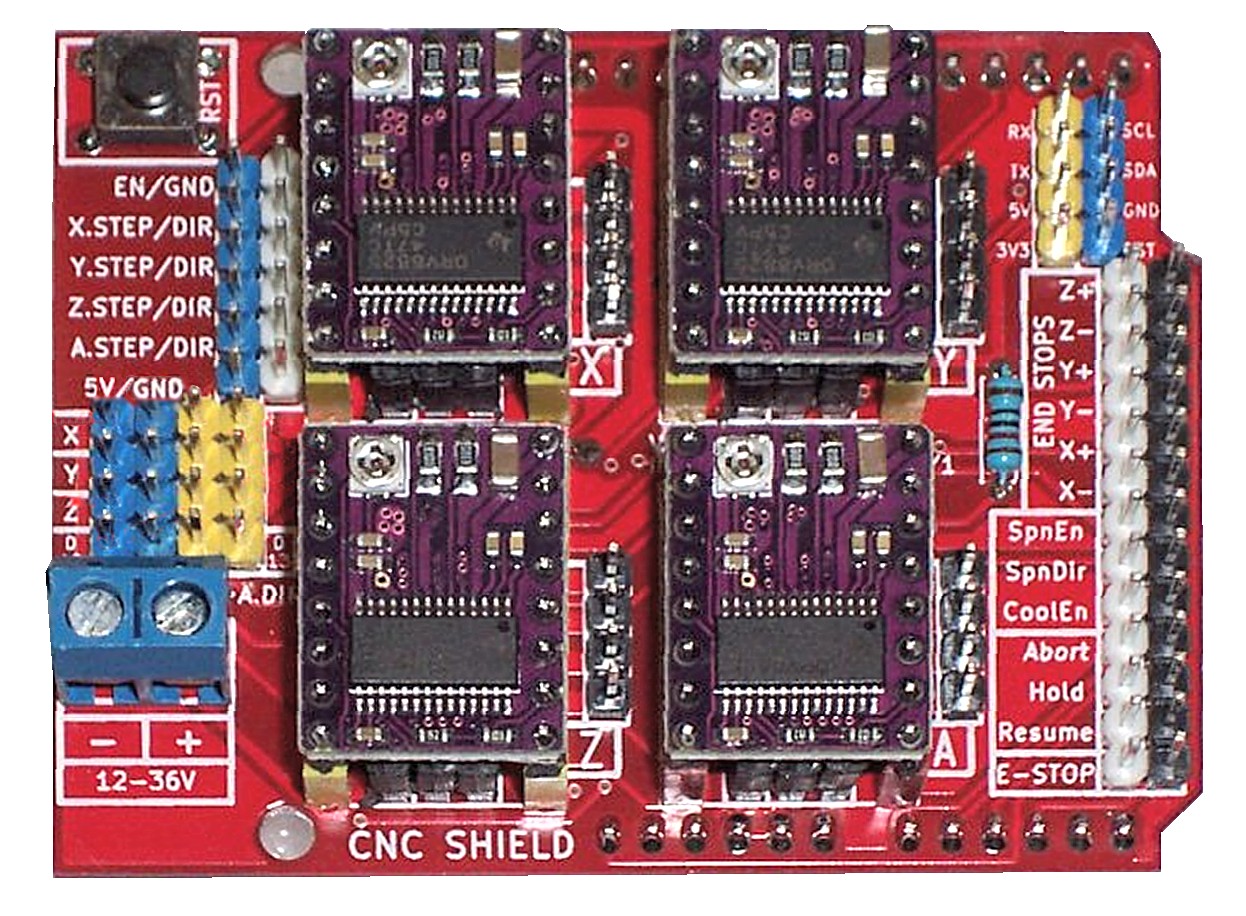
৵а§∞а•Н১ুৌ৮ а§Ха•З trimmers а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§єа§Ѓа•З৴ৌ а§Па§Х ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х а§Па§Х ৙а•На§∞а§Ха§Ња§∞ а§Ха§Њ ৴а§∞а§Ња§ђа•А а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а•За§В, а§Е৮а•Нৃ৕ৌ а§Ж৙ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ьа§≤а§Њ а§Єа§Х১ৌ а§єа•И а§ѓа§Њ а§Ђа•На§ѓа•Ва§Ь CncShield а§Яа•Иа§ђ ৙а•На§∞а§Ња§∞а§Ва§≠ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П.
stepper а§Ѓа•Ла§Яа§∞ а§Ха•Л ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§°а•На§∞а§Ња§З৵а§∞а•Ла§В

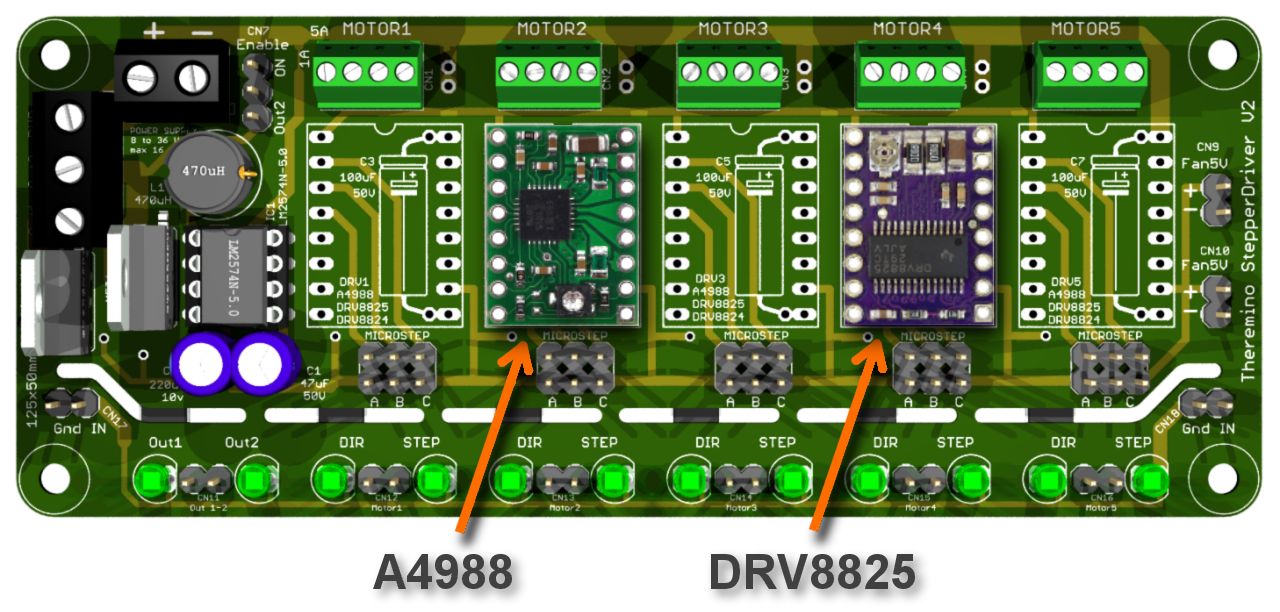
A4988 (৵ৌু а§Ы৵ড়), DRV8825 а§Ха•З ৪ৌ৕ ৙а•Ва§∞а•А ১а§∞а§є а§Єа•З а§Єа§Ва§Ч১ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В (৶ৌа§Иа§В а§Уа§∞ а§Ы৵ড়), ma si deve fare attenzione che vanno montati uno al contrario dell’altro (৮ড়ুа•Н৮ а§Ы৵ড়ৃৌа§Б ৶а•За§Ца•За§В).
а§ѓа§є а§Єа§ња§Ђа§Ња§∞ড়৴ а§Ха•А а§єа•И, ৶а•Л৮а•Ла§В 4988 а§Ха§њ 8825, ৵а•Ла§≤а•На§Яа•За§Ь а§Ха•З ৪ৌ৕ 12 а§ѓа§Њ 24 ৵а•Ла§≤а•На§Я а§Фа§∞ а§Ха•Ла§И а§Фа§∞ а§Еа§Іа§ња§Х. а§Ха•З ৪ৌ৕ 24 ৕а•Ла§°а§Ља§Њ а§Йа§Ъа•На§Ъ ৵а•Ла§≤а•На§Я а§Ха•А а§Еа§Іа§ња§Х১ু а§Ч১ড় а§єа•И. а§Ха•Л 36 ৵ৌа§≤а•На§Я а§Й৮а•На§єа•За§В а§Ха•На§ѓа•Ла§Ва§Ха§њ а§Ха§Њ а§Й৙ৃа•Ла§Ч ৮৺а•Аа§В а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§ђа§Єа•З а§Еа§Ъа•На§Ыа§Њ а§єа•И 4988 а§Й৮а•На§єа•За§В а§Єа§єа•А ৙а§Ха§°а§Љ ৮৺а•Аа§В а§Фа§∞ 8825 а§Ха§Ња§Ѓ а§Ха•Л а§≠а•А а§Єа•Аুড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§ђа§В৶ а§єа•Ла§Ча§Њ.
а§Ж৙ а§Й৮а•На§єа•За§В а§Ѓа•За§В ৵а§∞а•Н১ুৌ৮ а§Єа•З а§Еа§Іа§ња§Х а§За§Єа•Н১а•За§Ѓа§Ња§≤ ৮৺а•Аа§В а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П 1 а§Па§Ѓа•Н৙а•Аа§ѓа§∞. а§Еа§Іа§ња§Х১ু 2 а§Па§Ѓа•Н৙а•Аа§ѓа§∞, а§≤а•За§Хড়৮ а§°а•На§∞а§Ња§З৵а§∞ а§Фа§∞ а§Па§Х а§Па§Ха§≤ ৙а•На§∞৴а§Ва§Єа§Х а§єа•И а§Ха§њ а§Й৮а•На§єа•За§В а§Єа§≠а•А а§Єа•З ৆а§Ва§°а§Њ ৙а§∞ а§єа§∞ dissipators а§Ха•З ৪ৌ৕ вА٠৴а•Аа§∞а•На§Ј.
A4988 а§З৮ а§Ъড়১а•На§∞а•Ла§В а§Ѓа•За§В ৶ড়а§Ца§Ња§И ৶а•З১а•З а§єа•Иа§В а§єа§Ња§≤а§Ња§Ва§Ха§њ ৐ড়৮ৌ а§Ча§∞а•На§Ѓа•А а§Єа§ња§Ва§Х, а§≤а§Ча§≠а§Ч а§Єа§≠а•А ৵ড়а§Ха•На§∞а•З১ৌа§Уа§В а§Ха•А ৙а•З৴а§Х৴ а§Ха§∞১а•З а§єа•Иа§В а§Й৮а•На§єа•За§В ৪ৌ৕ а§єа•Аа§Я а§Єа§ња§Ва§Х.
а§Ьа•Иа§Єа•З а§Ха•Ла§И а§°а•Ла§∞-а§°а•На§∞а§Ња§З৵а§∞ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П?
а§Ха§∞ а§∞а§єа•З а§єа•Иа§В ৮ড়৴а•На§Ъড়১ а§∞а•В৙ а§Єа•З а§Па§Х ৕ৌа§≤а•А ৙а§∞ ৵а•За§≤а•На§°а•За§° а§Ъа§Ња§≤а§Ха•Ла§В а§Ха•З ৪ৌ৕ а§Єа•Аа§П৮৪а•А ৮ড়ৃа§В১а•На§∞а§Х а§Єа•З а§ђа§Ъ৮а•З. ৙৺а§≤а•З ৶а•Ла§Ј а§Ж৙ а§Па§≤ ৙а•Ва§∞а•На§£ а§Ђа•За§Ва§Х а§Ъа§Ња§єа§ња§П вА٠৮ড়ৃа§В১а•На§∞а§Х. ১а•Л ১а•Ба§Ѓ а§Па§Х а§ђа§єа•Б১ а§Ца§∞а•На§Ъ, а§Ж৙ а§Е৙৵ড়১а•На§∞ а§ђа§∞а•Н৐ৌ৶ а§Фа§∞ ll, а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§єа§Ѓа§Ња§∞а•З ৪ড়৶а•На§Іа§Ња§В১а•Ла§В а§Ха•З а§Ца§ња§≤а§Ња§Ђ а§Ьа§Њ а§∞а§єа§Њ а§Ха§Ъа§∞а•З а§Ха•Л а§Єа•Аুড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П.
а§Ъа§Ња§≤а§Ха•Ла§В а§Ха•Л а§Ж৪ৌ৮а•А а§Єа•З ১а•Ла§°а§Љ а§Єа§Х১а•З а§єа•Иа§В (а§ђа§Є а§Па§Х а§Ха•На§Ја§£а§ња§Х а§ђа•Ба§∞а§Њ а§Єа§В৙а§∞а•На§Х а§Па§Х а§За§Ва§Ь৮ ৙а§∞) а§Фа§∞ а§Ж৙ а§Ъড়৙а•На§Є ৙а•На§≤а•За§Я ৙а§∞ а§Ьа§Ча§є ৮৺а•Аа§В а§Ха§∞ а§Єа§Х১а•З, ১а•Л а§Ђа§ња§∞ ১а•Ба§Ѓ ৶а•Ва§∞ а§Ђа•За§Ва§Х ৙а•Ва§∞а•З ৮ড়ৃа§В১а•На§∞а§Х-а§Ъа§Ња§≤а§Х, а§Ж৙ а§Ха•З а§Єа•Иа§Ха§°а§Ља•Ла§В а§°а•Йа§≤а§∞ а§Фа§∞ а§∞а•Ла§Х а§Ха§Ња§∞ а§Па§Х а§≤а§Ва§ђа•З а§Єа§Ѓа§ѓ а§≤а•З১ৌ а§єа•И а§Ца•Л. а§ѓа§є а§≠а•А а§Па§Х ৙а•На§≤а•За§Я ৙а§∞ ৮а§П а§°а•На§∞а§Ња§З৵а§∞а•Ла§В ৵а•За§≤а•На§° а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ва§≠৵ ৮৺а•Аа§В а§єа•И, ১а•Л а§Еа§Ча§∞ а§єа§Ѓ ৴а•Ба§∞а•В, а§Й৶ৌ৺а§∞а§£ а§Ха•З а§≤а§ња§П,, ১а•А৮ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З ৪ৌ৕, а§Ж৙ а§Па§Х а§Ъа•М৕ৌ а§Фа§∞ ৙ৌа§Ва§Ъ৵ৌа§В а§єа§ња§Єа•На§Єа§Њ а§Ьа•Ла§°а§Љ а§Єа§Х১а•З а§єа•Иа§В. а§ѓа§є ৮ড়ৃа§В১а•На§∞а§Х а§Ха•З ৪ৌ৕ а§Ъа§Ња§∞ а§ѓа§Њ ৙ৌа§Ва§Ъ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха§Њ а§Й১а•Н৙ৌ৶৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৮а•З১а•Г১а•Н৵ а§Ха§∞а•За§Ва§Ча•З, а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§Еа§Ча§∞ а§Ъа•М৕а•З а§Фа§∞ ৙ৌа§Ва§Ъ৵а•За§В а§єа•Иа§В а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§≠а•А ৮৺а•Аа§В а§Ха§ња§ѓа§Њ, ৵ৌ৙৪ а§єа§Ѓа§Ња§∞а•З ৪ড়৶а•На§Іа§Ња§В১а•Ла§В а§Ха•З а§Ца§ња§≤а§Ња§Ђ а§Ьа§Њ а§∞а§єа•З а§єа•Иа§В а§Ха§Ъа§∞а•З а§Ха•Л а§Єа•Аুড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П.
а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Па§Х а§Еа§Ъа•На§Ыа§Њ ৪ুৌ৲ৌ৮ а§єа•И а§Х৮а•За§Ха•На§Яа§∞а•На§Є а§Ха•З ৪ৌ৕ а§°а•На§∞а§Ња§З৵а§∞а•На§Є, ১а•Л а§Ѓа•Иа§В ৙а•На§∞১ড়৪а•Н৕ৌ৙ড়১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В а§ѓа§Њ а§Ж৪ৌ৮а•А а§Єа•З а§Ьа•Ла§°а§Ља•За§В.

Rediculously ৙а•На§∞১ড়৪а•Н৕ৌ৙৮ а§°а•На§∞а§Ња§З৵а§∞ (а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В 3 а§ѓа•Ва§∞а•Л) а§Фа§∞ ১а•Аа§Є а§Єа•За§Ха§Ва§° а§Ѓа•За§В ৐৶а§≤а•За§В. ৃ৶ড় а§Ж৙ а§Па§Х а§Е১ড়а§∞а§ња§Ха•Н১ а§Ца§∞а•А৶ а§Фа§∞ а§Ж৙ а§Єа•Б৮ড়৴а•На§Ъড়১ а§єа•И а§Ха§њ ু৴а•А৮ а§∞а•Ла§Х а§Ха§≠а•А ৮৺а•Аа§В а§єа•Ла§Ча§Њ.
Salespeople а§Ьа•Л schematics ৙а•На§∞а§Хৌ৴ড়১ ৮৺а•Аа§В ৶а•Н৵ৌа§∞а§Њ а§ђа•З৵а§Ха•Ва§Ђа§Љ ৐৮ৌৃৌ ৮৺а•Аа§В а§Ьа§Њ а§Єа§Х১ৌ а§Фа§∞ “а§≤а§Ч১ৌ а§єа•И а§Ха§њ а§Ъа§≤а•Л” а§Ха§њ а§Й৮а§Ха•З а§°а•На§∞а§Ња§З৵а§∞а•На§Є а§ђа•З৺১а§∞ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В. а§З৮ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§єа•А а§∞а§єа•З а§єа•Иа§В а§Ьа§ђ а§Ж৙ а§Ъড়৙а•На§Є а§Ха•А а§Ьа§Ња§Ба§Ъ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ьа§Ња§У, а§ѓа§є а§єа§Ѓа•З৴ৌ ু৺ৌ৮ A4988 а§єа•И (а§ѓа§Њ а§Єа§Ѓа§Ха§Ха•На§Ј) Allegro а§Єа•З а§Й১а•Н৙ৌ৶а•Ла§В.
а§Фа§∞ а§Ж৙ а§≠а•А а§Ха§∞১а•З а§єа•Иа§В а§Ѓа•Ба§Ца•На§ѓ а§Ѓа•Б৶а•На§∞ড়১ а§Єа§∞а•На§Ха§ња§Я а§ђа•Ла§∞а•На§° ৙а§∞ а§Єа•Аа§Іа•З soldered ৮ড়ৃа§В১а•На§∞а§Х а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Іа•Нৃৌ৮, а§Ха•Ла§И ৴а•А১а§≤৮ ৙а•На§∞৴а§Ва§Єа§Х а§Фа§∞ а§єа•Аа§Я а§Єа§ња§Ва§Х-а§Ха§Ѓ а§Ъড়৙. а§Ъড়৙а•На§Є а§Ха•Л а§Па§Х а§ђа§єа•Б১ а§Ча§∞а•На§Ѓ а§єа•Ла§Ча§Њ, ৵ড়ীа§≤১ৌ а§Ха•А а§Єа§Ва§≠ৌ৵৮ৌ ৐৥৊ а§∞а§єа•А а§єа•И а§Фа§∞ ৙а•Ва§∞а•З ৮ড়ৃа§В১а•На§∞а§Х а§Ца•Л৮а•З.
а§Ъа§Ња§≤а§Х а§ђа•Ла§∞а•На§° – а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З а§≤а§ња§П а§Па§Х а§Єа§Ѓа§∞а•Н৕৮ а§Жа§Іа§Ња§∞
а§Ѓа§єа§Ва§Ча•А а§Єа•Аа§П৮৪а•А-৮ড়ৃа§В১а•На§∞а§Х а§ђа•Ла§∞а•На§° ৙а§∞ а§Єа•Аа§Іа•З soldered а§Ъড়৙ а§Ха•З ৪ৌ৕ а§Ца§∞а•А৶ ৮৺а•Аа§В! а§Ъа§Ња§≤а§Ха•Ла§В а§єа§Ѓа•З৴ৌ ৐৶а§≤а•А а§Ьа§Њ а§Ъа§Ња§єа§ња§П, а§З৮ а§Ы৵ড়ৃа•Ла§В а§Ха•З а§Ъа§Ња§≤а§Х а§ђа•Ла§∞а•На§° а§Ѓа•За§В а§Ха•З а§∞а•В৙ а§Ѓа•За§В.
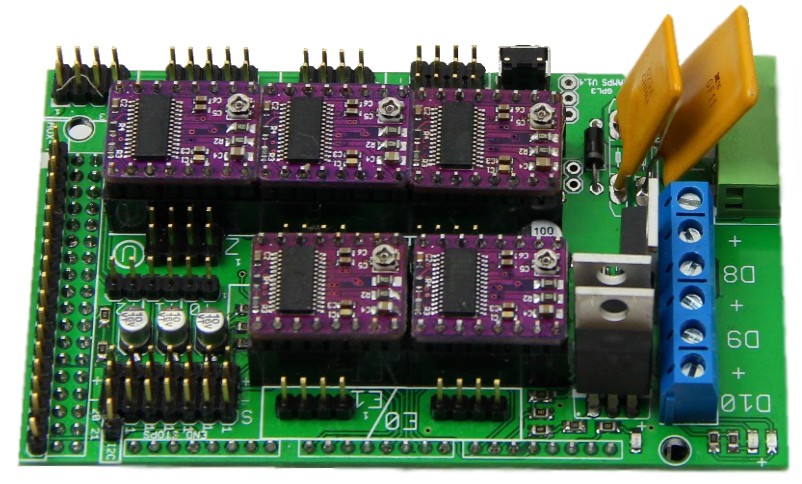
а§К৙а§∞ а§Ха•А а§Ы৵ড় а§Ѓа•За§В а§Ж৙ ৕ৌа§≤а•А ৶а•За§Ц Theremino_StepperDriver (а§Ьৌ৮а§Ха§Ња§∞а•А а§За§Є ৙а•Га§Ја•Н৆ ৙а§∞), а§Ьа§ђа§Ха§њ ৮а•Аа§Ъа•З ৶а•Л а§Ы৵ড়ৃа•Ла§В а§Ѓа•За§В а§Ж৙ ৶а•За§Ц а§Єа§Х১а•З а§єа•И “а§∞а•Иа§В৙” а§Фа§∞ “CncShieldV3”. а§Й১а•Н১а§∞а§Ња§∞а•Н৶а•На§І а§≤а§Ња§Ч১ а§Ха§Ѓ, а§≤а•За§Хড়৮ а§Ѓа•Иа§В optocoupled ৮৺а•Аа§В а§єа•Ва§В, ১а•Л ৵а•З а§ђа§ња§Ьа§≤а•А а§Ха•З ৴а•Ла§∞ а§Єа§Ѓа§Єа•На§ѓа§Ња§Уа§В а§Й১а•Н৙৮а•Н৮ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В.



а§Е৮а•Б৴а§Ва§Єа§Њ а§Ха§∞১а•З а§єа•Иа§В а§Ха§њ а§Ж৙ а§Еа§Іа§ња§Х১ু ৙а•На§∞১ড়а§∞а•В৙а§Х১ৌ а§∞а§Ца•За§В, а§≠৵ড়ৣа•На§ѓ а§Ха•З ৙а§∞ড়৵а§∞а•Н১৮ а§Ха•А а§Е৮а•Бু১ড় ৶а•За§В а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§Єа•Ба§Іа§Ња§∞ а§Фа§∞ ৙а•На§∞১ড়৪а•Н৕ৌ৙৮. а§ѓа§Њ Breadboard а§Фа§∞ а§Ха§≤а§Ѓ а§Ха•З ৪ৌ৕ а§°а•На§ѓа•В৙а•Й৮а•На§Я а§ђа§ња§Ха•На§∞а•Аа§Єа•В১а•На§∞, а§ѓа§Њ а§Пৰৌ৙а•На§Яа§∞ ৙а•На§≤а•За§Я а§Ха•З ৪ৌ৕ Theremino_StepperDriver, а§ѓа§Њ ৪ৌ৕ а§∞а•Иа§В৙, а§ѓа§Њ а§Ха•З ৪ৌ৕ а§Па§Х CncShieldV3 (৙ড়а§Ыа§≤а•З ৶а•Л eBay ৙а§∞ ৙ৌৃৌ а§Ьа§Њ а§Єа§Х১ৌ а§єа•И).




а§∞а•Иа§В৙ а§Фа§∞ CncShieldV3 а§Ха•З а§∞а•В৙ а§Ѓа•За§В ৙а•На§≤а•За§Яа•За§В, sistemaTheremino а§Ха•З а§≤а§ња§П ৵ড়৴а•За§Ј а§∞а•В৙ а§Єа•З ৮ড়а§∞а•Нুড়১ ৮৺а•Аа§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В, ১ৌа§∞а•Ла§В а§Жа§∞а•За§Ц ৶а•За§Ца•За§В а§Х৮а•За§Ха•Н৴৮ ৐৮ৌ৮а•З а§Ха•З а§≤а§ња§П. ৃ৶ড় а§Єа§В৶а•За§є а§Ѓа•За§В а§Ха•Г৙ৃৌ а§єа§Ѓа•За§В а§Иа§Ѓа•За§≤.
Posizionare а§Ѓа•Иа§В а§°а•На§∞а§Ња§З৵а§∞ sulla CncShieldV3 а§И sulla а§∞а•Иа§В৙
а§З৮ а§Ы৵ড়ৃа•Ла§В а§Ха•Л а§Ха•З৵а§≤ DRV8825 а§°а•На§∞а§Ња§З৵а§∞а•На§Є а§Ха•З а§≤а§ња§П ুৌ৮а•На§ѓ а§єа•Иа§В, а§Єа•Б৮ড়৴а•На§Ъড়১ а§Ха§∞а•За§В а§Ха§њ A4988 ৙ৌа§∞ а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•З ৪ৌ৕ а§Єа§Ѓа•На§Ѓа§ња§≤ড়১ а§Ха§ња§ѓа§Њ а§Ьৌ৮ৌ а§Ъа§Ња§єа§ња§П. а§Е৮а•На§ѓ а§°а•На§∞а§Ња§З৵а§∞а•На§Є а§Ха•З а§≤а§ња§П ৮ড়а§∞а•Нুৌ১ৌ а§Ха•А ৵а•За§ђ а§Єа§Ња§За§Я а§Ха•А а§Ьа§Ња§Ба§Ъ а§Ха§∞а•За§В.
а§Па§Х ১ৌа§∞а•Ла§В а§Й৶ৌ৺а§∞а§£
а§Іа•Нৃৌ৮: а§За§Ва§Ь৮ а§Єа§Ха•На§Ја§Ѓ а§Ха§∞а•За§В а§Ха•Л а§Єа§Ха•На§Ја§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§ња§Ча•Н৮а§≤ GND а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я а§єа•Л৮ৌ а§Ж৵৴а•На§ѓа§Х а§єа•И. ১а•Л а§єа§Ѓа•З৴ৌ а§Па§Х а§Ьа§Ѓа•Н৙а§∞ а§°а§Ња§≤ “а§П৮ / GND”. ৃ৶ড় а§Ж৙ а§Ра§Єа§Њ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§≠а•Ва§≤ а§Ча§П а§єа•Иа§В а§Ца•Ла§Ь а§За§Ва§Ь৮ ৮ а§≤а•З а§Ьа§Ња§Па§Б.


а§За§Є а§Ъড়১а•На§∞ а§Ѓа•За§В а§Ж৙ а§Ѓа§Ња§Єа•На§Яа§∞ а§Фа§∞ CncShieldV3 а§Ха•З а§ђа•Аа§Ъ ১ৌа§∞а•Ла§В а§Ха§Њ а§Па§Х а§Й৶ৌ৺а§∞а§£ ৶а•За§Ц а§Єа§Х১а•З а§єа•Иа§В.
а§За§Є ১ৌа§∞а•Ла§В а§Ѓа•За§В ৮а•М а§Ѓа§Ња§Єа•На§Яа§∞ ৙ড়৮ а§Еа§Єа§Ња§З৮ুа•За§Ва§Я а§Ъа§Ња§∞ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Фа§∞ ৙ৌа§Ва§Ъ InOut а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ьа•Ба§°а§Ља•З а§єа•Ба§П а§єа•Иа§В “а§Ха•А а§Єа•З৵ৌ”. InOut ১а§Ха§≤а§Њ а§Ѓа•Ла§Яа§∞ а§Ха•З ৙а•На§∞а§Ьа•Н৵а§≤৮ а§Ха•Л ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Фа§∞ ৙৥৊а•За§В ৮а•Аа§Ъа•З а§Єа•Н৵ড়а§Ъ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•З৵ৌ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В. Doesn√≠t, а§Еа§≠а•А а§≠а•А а§Й৙а§≤а§ђа•На§І ১а•А৮ а§Еа§Іа§ња§Х InOut, а§Ѓа§Ња§Єа•На§Яа§∞ ৙а§∞.
а§Єа§Ва§Ха•З১ ১ৌа§∞а•Ла§В а§Е৮৙а•На§≤а§Ч а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ а§єа•И а§Фа§∞ а§Ха§ња§Єа•А а§≠а•А а§Єа§Ѓа§ѓ ৙а§∞ а§≤а•З а§Ьа§Ња§ѓа§Њ а§Ча§ѓа§Њ, а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§Єа§ђ а§Ха•Ба§Ы а§Ха•З ৪ৌ৕ а§Ъа§Ња§≤а•В, а§≤а•За§Хড়৮ ৐ৌ৶ а§Єа•З ৵৺ৌа§Б а§Па§Х а§ђа§°а§Ља§Њ, а§ђа•Ба§∞а§Њ а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ж৙а•Ва§∞а•Н১ড় а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я 220 ৵а•Ла§≤а•На§Я, а§Ж৙ а§Ьа§Ѓа•А৮ а§Ха§њ ১ৌа§∞ а§ђа§єа•Б১ а§єа•А ৪ৌ৵৲ৌ৮ а§∞৺৮ৌ а§єа•Ла§Ча§Њ, CncShield а§Фа§∞ а§Ѓа§Ња§Єа•На§Яа§∞ а§Ха•З а§ђа•Аа§Ъ, ৴а•Йа§∞а•На§Яа•На§Є а§єа•Иа§В, а§Ѓа§Ьа§ђа•В১ а§Фа§∞ а§єа§Ѓа•З৴ৌ а§Х৮а•За§Ха•На§Яа•За§°.
а§Ѓа§Ња§Єа•На§Яа§∞ а§Фа§∞ а§°а•На§∞а§Ња§З৵а§∞ Theremino а§Ха•З а§ђа•Аа§Ъ а§Х৮а•За§Ха•Н৴৮
а§ѓа§єа§Ња§Б а§єа§Ѓ ৵а•На§ѓа§Ња§Ца•На§ѓа§Њ а§Ха•Иа§Єа•З а§Ѓа§Ња§Єа•На§Яа§∞ а§Єа•Аа§Іа•З а§Х৮а•За§Ха•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§°а•На§∞а§Ња§З৵а§∞а•На§Є, а§Па§Х а§°а•На§∞а§Ња§З৵а§∞-а§ђа•Ла§∞а•На§° а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§ња§П ৐ড়৮ৌ.
а§°а•На§∞а§Ња§З৵а§∞а•Ла§В A4988

а§°а•На§∞а§Ња§З৵а§∞а•Ла§В DRV8825
Microstep а§Ха•А а§Єа•За§Яа§ња§Ва§Ча•На§Є
| а§Ч (M0) (Ms1) |
а§ђа•А (M1) (MS2) |
а§Ѓа•За§В (M2) (Ms3) |
Microstep а§Єа•За§Яа§ња§Ва§Ча•На§Є Drv8825 |
Microstep а§Єа•За§Яа§ња§Ва§Ча•На§Є A4988 |
| а§Ха§Ѓ | а§Ха§Ѓ | а§Ха§Ѓ | ৙а•Ва§∞а•На§£ а§Х৶ু | ৙а•Ва§∞а•На§£ а§Х৶ু |
| а§Йа§Ъа•На§Ъ | а§Ха§Ѓ | а§Ха§Ѓ | а§Жа§Іа§Њ а§Ъа§∞а§£ | а§Жа§Іа§Њ а§Ъа§∞а§£ |
| а§Ха§Ѓ | а§Йа§Ъа•На§Ъ | а§Ха§Ѓ | 1/4 а§Х৶ু | 1/4 а§Х৶ু |
| а§Йа§Ъа•На§Ъ | а§Йа§Ъа•На§Ъ | а§Ха§Ѓ | 1/8 а§Х৶ু | 1/8 а§Х৶ু |
| а§Ха§Ѓ | а§Ха§Ѓ | а§Йа§Ъа•На§Ъ | 1/16 а§Х৶ু | – |
| а§Йа§Ъа•На§Ъ | а§Ха§Ѓ | а§Йа§Ъа•На§Ъ | 1/32 а§Х৶ু | – |
| а§Ха§Ѓ | а§Йа§Ъа•На§Ъ | а§Йа§Ъа•На§Ъ | 1/32 а§Х৶ু | – |
| а§Йа§Ъа•На§Ъ | а§Йа§Ъа•На§Ъ | а§Йа§Ъа•На§Ъ | 1/32 а§Х৶ু | 1/16 а§Х৶ু |
а§Ха§Ѓ а§Ха§Њ ু১а§≤а§ђ а§єа•И: “GND а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ” ৃৌ৮а•А “Unjumpered”
а§Па§≤а•На§Яа•Л ৪ৌ৲৮: “а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ” ৃৌ৮а•А “৙а•Ба§≤ а§Ха•З ৪ৌ৕”
CncShield а§Яа•Иа§ђа•На§Є а§Фа§∞ а§∞а•Иа§В৙ ৙а•Ба§≤а•Ла§В а§Ха•З а§≤а§ња§П а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Єа§Ва§Ха•З১ ৮а•З১а•Г১а•Н৵, ১а•Л а§Ж৙ а§Єа§≠а•А ১а•А৮ ৮ড়а§Ха§Ња§≤а§Њ а§Ьа§В৙а§∞а•На§Є а§Ха•З ৪ৌ৕ а§Ѓа§ња§≤ “৙а•Ва§∞а•На§£ а§Х৶ু”. а§єа§Ѓа•З৴ৌ а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а•За§В 8, 16 а§ѓа§Њ 32 microstep, а§Йа§Єа§Ха•З ৐ৌ৶ ৙৺а§≤а•А а§ђа§Ња§∞ ৶а•Л ৙а•Ба§≤а•Ла§В а§ѓа§Њ а§Еа§В১ড়ু а§Єа§Ѓа•На§Ѓа§ња§≤ড়১ а§Ха§∞а•За§В, а§ѓа§Њ а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§Єа§≠а•А ১а•А৮. а§Фа§∞ а§Ча•Ба§£а§Њ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৃৌ৶ а§∞а§Ца•За§В, Nell вАЩ а§Па§Ъа§Па§Па§≤, ুৌ৮ “а§Ѓа§ња§Ѓа•А а§Ха•З а§≤а§ња§П а§Ъа§∞а§£” а§Ѓа§Ња§За§Ха•На§∞а•Л-а§Ъа§∞а§£а•Ла§В а§Єа•За§Я а§Ха•А а§Єа§Ва§Ца•На§ѓа§Њ а§Ха•З а§≤а§ња§П.
а§Іа•Нৃৌ৮: а§Ха•Ба§Ы а§Ха§Ња§∞а•На§° (а§∞а•Иа§В৙ 1.4 а§Ха•Ба§Ы ৮ড়а§∞а•Нুৌ১ৌа§Уа§В), а§Ьа§В৙а§∞а•На§Є microstep а§Ъৃ৮ а§Ха§Ња§Ѓ ৮৺а•Аа§В а§Ха§∞ а§∞а§єа§Њ а§єа•И. а§Ха•Ба§Ы а§ђа•Ба§∞а•А ৙а•На§∞১ড়а§≠а§Њ ৙а•Аа§Єа•Аа§ђа•А а§Й৮а•На§єа•За§В ১ৃ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•За§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৐৶а§≤ ৶ড়ৃৌ а§єа•И 16 microstep (а§Ха•На§ѓа•Ла§В а§З১৮ৌ а§Ѓа•За§В 3D ৙а•На§∞а§ња§Ва§Яа§∞ а§Ха•А а§Єа•З৵ৌ). а§ђа§Є а§Па§Х ৙а§∞а•Аа§Ха•На§Ја§Х а§Ъৃ৮ а§Ьа§Ѓа•Н৙а§∞ ৙ড়৮ а§Ха•З ৪ৌ৕ а§Ха•А а§Ьа§Ња§Ба§Ъ а§Ха§∞а•За§В, ৃ৶ড় ৙ড়৮ а§Ха•А а§Ьа•Ла§°а§Ља•А shorted а§єа•Иа§В, а§Ђа§ња§∞ а§ѓа§є а§З৮ а§Ха§Ња§∞а•На§°а•Ла§В а§Ѓа•За§В а§Єа•З а§Па§Х а§єа•И. ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х ৙а•Ба§≤а•Ла§В а§Ха•Л ৮ড়а§Ха§Ња§≤ а§Ха§∞ а§За§Є а§Ѓа§Ња§Ѓа§≤а•З а§Ѓа•За§В, а§Іа•Иа§∞а•На§ѓ а§Фа§∞ Dremel а§Ха•З ৪ৌ৕, а§Ж৙ ৆а•Аа§Х а§Ха§∞ а§Єа§Х১ৌ а§єа•И ৙а•Аа§Єа•Аа§ђа•А.
а§Яа•На§∞а§ња§Ѓа§∞ ৵а§∞а•Н১ুৌ৮ а§Єа•Аুড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞а•За§В
A4988 а§Ѓа•Йа§°а•На§ѓа•Ва§≤, Pololu а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Й১а•Н৙ৌ৶, а§Яа•На§∞а§ња§Ѓа§∞ а§Єа•З а§єа•И 10 Kohm а§Фа§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ а§єа•И 5 ৵а•Ла§≤а•На§Я а§Єа•З а§Па§Х а§∞а•Ла§Х৮а•З৵ৌа§≤а§Њ а§Ха•З ৪ৌ৕ 20 Kohm. а§Ьа§ња§Єа§Ха•З ১৺১ а§Єа§В৶а§∞а•На§≠ ৵а•Ла§≤а•На§Яа•За§Ь, ৪ৌ৕ а§Яа•На§∞а§ња§Ѓа§∞ а§Еа§Іа§ња§Х১ু, а§Ха•А а§єа•И 1.6 ৵а•Ла§≤а•На§Я. а§За§Є а§Єа§В৶а§∞а•На§≠ ৶а•Н৵ৌа§∞а§Њ а§Ж৆ а§Ъড়৙ ৙а§∞ а§Жа§В১а§∞а§ња§Х а§∞а•В৙ а§Єа•З ৵ড়а§≠а§Ња§Ьড়১ а§єа•И а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶ ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В а§Ха•З ৪ৌ৕ а§Ха•А ১а•Ба§≤৮ৌ а§Ѓа•За§В 0.05 а§Уа§Ѓ. ১৐ а§Ж৙ а§Па§Х а§Ѓа•Ма§Ьа•В৶ৌ а§°а•З৥৊ а§Ча•Б৮ৌ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§В৶а§∞а•На§≠ ৵а•Ла§≤а•На§Яа•За§Ь а§ђа§∞а§Ња§ђа§∞ а§єа•Л.
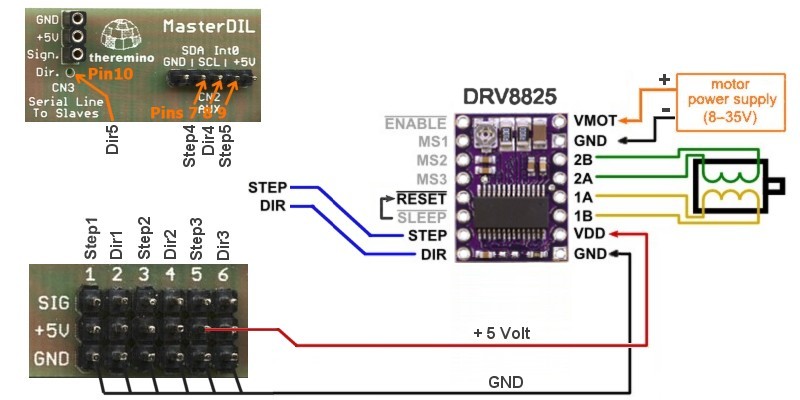
DRV8825 ৙а•На§∞৙১а•На§∞ ৙а§∞, Pololu ৶а•Н৵ৌа§∞а§Њ а§Й১а•Н৙ৌ৶ড়১, а§Яа•На§∞а§ња§Ѓа§∞ а§Єа•З а§єа•И 10 Kohm а§Фа§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ а§єа•И 3.3 ৵а•Ла§≤а•На§Я а§Єа•Н৕ড়а§∞ а§єа•Л. а§Ьа§ња§Єа§Ха•З ১৺১ а§Єа§В৶а§∞а•На§≠ ৵а•Ла§≤а•На§Яа•За§Ь, ৪ৌ৕ а§Яа•На§∞а§ња§Ѓа§∞ а§Еа§Іа§ња§Х১ু, а§Ха•А а§єа•И 3.3 ৵а•Ла§≤а•На§Я. а§За§Є а§Єа§В৶а§∞а•На§≠ а§Ъড়৙ а§Ха•З а§Еа§В৶а§∞ ৙ৌа§Ва§Ъ а§Єа•З ৵ড়а§≠а§Ња§Ьড়১ а§єа•И а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶ ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В а§Ха•З ৪ৌ৕ а§Ха•А ১а•Ба§≤৮ৌ а§Ѓа•За§В 0.1 а§Уа§Ѓ. ১৐ а§Ж৙ а§Па§Х а§Ѓа•Ма§Ьа•В৶ৌ а§Єа§В৶а§∞а•На§≠ ৵а•Ла§≤а•На§Яа•За§Ь а§Ха•З а§≤а§ња§П ৶а•Л а§ђа§Ња§∞ а§ђа§∞а§Ња§ђа§∞ а§єа•Л.
а§Єа§В৶а§∞а•На§≠ ৵а•Ла§≤а•На§Яа•За§Ь GND а§Фа§∞ а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•З а§Ха•За§В৶а•На§∞ ৙а§∞ а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х ৮а§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Ха•З ৪ৌ৕ а§Па§Х ৙а§∞а•Аа§Ха•На§Ја§Х ৶а•Н৵ৌа§∞а§Њ ুৌ৙ৌ а§Ьৌ১ৌ а§єа•И.
а§ѓа•З ৵а§∞а•Н১ুৌ৮ ৮ড়ৃুа•Ла§В а§Ха§њ ৙а•На§∞ৌ৙а•Н১ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В:
| Trimmers а§Ха•А а§Єа•Н৕ড়১ড় | A4988 | Drv8825 |
| а§Єа§ђа§Єа•З а§Ха§Ѓ | 4.0 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 6.6 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
| ১а•А৮ а§Ъа•М৕ৌа§И | 3.0 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 4.9 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
| а§Па§Х ৶а•Л-১ড়৺ৌа§И | 2.7 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 4.4 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
| а§Ѓа§Іа•На§ѓ-а§Ѓа•За§В | 2.0 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 3.3 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
| а§Па§Х ১ড়৺ৌа§И а§Ѓа•За§В | 1.3 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 2.2 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
| а§Па§Х ১ড়ুৌ৺а•А а§Ѓа•За§В | 1.0 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 1.6 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
| ৴а•В৮а•На§ѓ | 0 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ | 0 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ |
а§Іа•Нৃৌ৮: а§Ьа•Иа§Єа§Њ а§Ха§њ а§Ж৙ ৶а•За§Ц а§Єа§Х১а•З а§єа•Иа§В, а§Ьа•Л а§З৮ а§∞а•В৙а•Ла§В а§°а§ња§Ьа§Ња§З৮ ৙а•Ва§∞а•А ১а§∞а§є а§Єа•З ৙а•Ва§∞а•На§£ ৙а•Иুৌ৮а•З ৙а§∞ ৃৌ৶ а§Ха§ња§ѓа§Њ а§єа•И. а§Еа§Іа§ња§Х১ু ৵а§∞а•Н১ুৌ৮ ৪৺৮а•З а§ѓа•Ла§Ча•На§ѓ (а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§Еа§Іа§ња§Х১ু а§Ча§∞а•На§Ѓа•А а§Єа§ња§Ва§Х а§Фа§∞ ৙а•На§∞৴а§Ва§Єа§Ха•Ла§В а§Ха•З ৪ৌ৕) а§Ха•А а§єа•И 2 Amperes а§Ха•З а§≤а§ња§П 4988, а§Фа§∞ 2.2 а§Ха•З а§≤а§ња§П Amperes 8825.
а§Яа•На§∞а§ња§Ѓа§∞ а§Ха§Њ ৙а•Ва§∞а•На§£ ৙а•Иুৌ৮а•З ৙а§∞ ১а•Л ৶а•Л а§ѓа§Њ ১а•А৮ а§Ча•Б৮ৌ а§Ха•На§ѓа§Њ а§Йа§Ъড়১ а§єа•Ла§Ча§Њ а§Єа•З а§Еа§Іа§ња§Х а§єа•И. а§Па§Х ৙а•Ва§∞а•На§£ ৙а•Иুৌ৮а•З ৙а§∞ ৪ৌ৕ а§З১৮ৌ а§Йа§Ъа•На§Ъ а§Ыа§Ња§Ба§Яа•Л а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ ৶а•Л а§ѓа§Њ ১а•А৮ а§ђа§Ња§∞ а§Х৆ড়৮ а§єа•Л а§Ьৌ১ৌ а§єа•И. ১а•Л а§Ха§≠а•А а§Жа§Іа•З а§Єа•З а§Еа§Іа§ња§Х а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П а§ђа§єа•Б১ ৪ৌ৵৲ৌ৮ а§∞৺৮ৌ (а§Ха•З ৪ৌ৕ 4988) а§Фа§∞ а§Ха§≠а•А ৮৺а•Аа§В а§Єа•З а§Еа§Іа§ња§Х а§Па§Х ১ড়৺ৌа§И (а§Ха§Њ ৙а•На§∞১ড়৮ড়৲ড়১а•Н৵ 8825).
а§За§Єа§Ха•З а§Еа§≤ৌ৵ৌ, а§Єа§ња§∞а•На§Ђ а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ а§≠а•А а§Х৆ড়৮ ৐৮ৌ৮а•З а§Ха•З а§≤а§ња§П, а§Ха•Ба§Ы trimmers а§Ха•Ла§И а§ѓа§Ња§В১а•На§∞а§ња§Х ৙а•Га§Ја•Н৆а§≠а•Ва§Ѓа§њ а§єа•И. а§Ж৙ ৴а•В৮а•На§ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ьа§Ња§У, ৶а•За§Ц а§∞а§єа•А а§єа•И а§Фа§∞ а§Ж৙ ৐ড়৮ৌ ৙ৌ৪ а§Єа•Н৵ড়а§Ъ а§Єа•З вАЩ а§Е৮а•На§ѓ ৙а§Ха•На§Ј, а§Еа§Іа§ња§Х১ু ৵а§∞а•Н১ুৌ৮ а§Фа§∞ ১а•Ба§∞а§В১ а§Ха•В৶ а§Ђа§Ља•На§ѓа•Ва§Ьа§Љ а§Фа§∞ а§°а•На§∞а§Ња§З৵а§∞ ৶а•З.
а§Єа•Б৙а§∞ а§Іа•Нৃৌ৮: а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З ৪ৌ৕ а§Ха§Ња§∞а•На§ѓ а§Ха§∞১ৌ а§єа•И а§За§Єа§Ха•З ৵ড়৙а§∞а•А১ trimmers а§єа•Иа§В. а§Ьа§ња§Єа§Єа•З ৙৺а§≤а•З а§Е৙৮а•З а§°а•На§∞а§Ња§З৵а§∞ ৙а§∞ а§≠а§∞а•Ла§Єа§Њ, а§ѓа§є ৵а•Ла§≤а•На§Яа•За§Ь а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•Л ুৌ৙৮а•З а§Ха•З а§≤а§ња§П а§Еа§Ъа•На§Ыа§Њ а§єа•И. а§Па§Х ৮а•На§ѓа•В৮১ু а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮, ৵ৌুৌ৵а§∞а•Н১, ১৮ৌ৵ а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П (а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৴а•В৮а•На§ѓ ৵а•Ла§≤а•На§Я а§Єа•З 100 millivolts). а§Еа§Іа§ња§Х১ু а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ а§Ха§∞а§Ха•З, ৶а§Ха•На§Ја§ња§£а§Ња§µа§∞а•Н১, ৵а•Ла§≤а•На§Яа•За§Ь а§Єа•З а§Еа§Іа§ња§Х а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П (а§Єа•З 1.5 а§Ѓа•За§В 3.3 а§°а•На§∞ৌৃ৵а§∞ а§Ха•З а§Жа§Іа§Ња§∞ ৙а§∞ ৵а•Ла§≤а•На§Я). ৃ৶ড় а§ѓа§є ু৺ৌ৮ ৶а•За§Ца§≠а§Ња§≤ а§Й৮ а§°а•На§∞а§Ња§З৵а§∞а•На§Є а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৮৺а•Аа§В а§≤а•З а§Ха§∞১ৌ а§єа•И, а§єа§Ѓа•З৴ৌ ৃৌ৶ а§єа•И а§Ха§њ а§Е৲ড়৮ড়ৃু а§Ха•З ৵ড়৙а§∞а•А১ (а§Ьа•Л а§Й৮ PCBS ৐৮ৌৃৌ ৵ড়а§≠а§Ња§Ч а§Ха•Л а§Єа•Н৕ৌ৮ৌа§В১а§∞ড়১ а§Ха§ња§ѓа§Њ а§Ьৌ৮ৌ а§Ъа§Ња§єа§ња§П “а§Єа•А৵а§∞ а§Ха•А а§Єа§Ђа§Ња§И”, а§За§Єа§Єа•З ৙৺а§≤а•З а§Ха§њ ৵৺ а§Ха§ња§Єа•А а§≠а•А а§Фа§∞ а§Еа§Іа§ња§Х ৮а•Ба§Х৪ৌ৮ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В).
а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•Л а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ ১а•А৮ ১а§∞а•Аа§Ха•Ла§В а§Ѓа•За§В а§Єа•З а§Па§Х а§Ѓа•За§В а§Жа§Ча•З ৐৥৊৮а•З а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В
৵ড়৲ড় 1 – а§Іа•Аа§Ѓа•А а§Ч১ড় а§Єа•З: а§За§Є ৵ড়৲ড় а§Єа§Яа•Аа§Х ৙а•На§∞а•За§Ѓа§ња§ѓа•Ла§В а§Ха•З а§≤а§ња§П а§Й৙ৃа•Ба§Ха•Н১ а§єа•И, ৵а§∞а•Н১ুৌ৮ а§Ха•З ৮а•На§ѓа•Ва§Ѓа•За§∞а§ња§Х ুৌ৮ а§Ьৌ৮৮ৌ а§Ъৌ৺১а•З а§єа•Иа§В. ৵а•Ла§≤а•На§Яа•За§Ь а§≤а§Ња§Ча•В а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§°а•На§∞а§Ња§З৵а§∞ (а§ѓа§єа§Ња§В ১а§Х а§Ха§њ 12 а§ѓа§Њ 24 а§Ж৙ а§Ха•А а§Ьа§∞а•Ва§∞১ а§єа•И ৙а§∞ а§Жа§В১а§∞а§ња§Х а§∞а•В৙ а§Єа•З а§Ђа§Ља•Аа§° а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৵а•Ла§≤а•На§Я 5 а§Ха•Ба§Ы а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З ৵а•Ла§≤а•На§Я) а§≤а•За§Хড়৮ а§Ѓа•Ла§Яа§∞а•На§Є а§Х৮а•За§Ха•На§Я ৮ а§Ха§∞а•За§В. а§Ьа§Ѓа•А৮ а§Фа§∞ а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•А ৲ৌ১а•Б а§≠а§Ња§Ч а§Ха•З а§ђа•Аа§Ъ ৵а•Ла§≤а•На§Яа•За§Ь а§Ха•Л ুৌ৙৮а•З. ৵а•Ла§≤а•На§Яа•За§Ь а§Па§Х ৵а§∞а•Н১ুৌ৮ а§єа•И а§Ха§њ а§Жа§Іа§Њ а§∞а•За§Яа•За§° ৵а§∞а•Н১ুৌ৮ а§єа•И ৙а•На§∞ৌ৙а•Н১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞а•За§В (৶а•Л а§Фа§∞ а§Па§Х а§Жа§Іа§Њ а§ђа§Ња§∞ ৵а•Ла§≤а•На§Яа•За§Ь =, а§Ха•З ৪ৌ৕ 4988, а§ѓа§Њ 2 а§ђа§Ња§∞ ৵а•Ла§≤а•На§Яа•За§Ь, а§Ха•З ৪ৌ৕ 8825). а§Йа§Єа§Ха•З ৐ৌ৶ ৙а§∞а•Аа§Ха•На§Ја§£ а§К৙а§∞ а§ѓа§Њ ৮а•Аа§Ъа•З а§Ха§∞৮ৌ ৴а•Ба§∞а•В, а§єа§Ѓа•З৴ৌ ৙а•На§∞১а•На§ѓа•За§Х ৙а§∞а•Аа§Ха•На§Ја§Њ а§Ха•З а§≤а§ња§П а§Ѓа•Аа§Яа§∞ а§Ха•З ৪ৌ৕ ুৌ৙ৌ. а§Па§Х а§Й৙ৃа•Ба§Ха•Н১ а§Па§Х ৙а•На§∞а§Ха§Ња§∞ а§Ха§Њ ৴а§∞а§Ња§ђа•А а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а•За§В (а§ђа•З৺১а§∞ ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х) а§Фа§∞ а§ђа§єа•Б১ ৪ৌ৵৲ৌ৮ а§∞৺৮ৌ. а§ђа•З৴а§Х а§єа§∞ а§Яа•За§Єа•На§Я а§Ха•З а§≤а§ња§П ১а•Ба§Ѓ ৴а§Ха•Н১ড় а§Ха•Л ৶а•Ва§∞ а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П, а§°а§ња§Єа•На§Х৮а•За§Ха•На§Я а§Ха§∞а•За§В а§Фа§∞ ৵ড়৶а•На§ѓа•Б১ а§За§Ва§Ь৮ а§Ђа§ња§∞ а§Єа•З а§Х৮а•За§Ха•На§Я а§Ха§∞а•За§В. а§Ха•На§ѓа•Ла§В а§ѓа§є ৵ড়৲ড় а§ђа§єа•Б১ а§Іа•Аа§Ѓа•А а§єа•И.
৵ড়৲ড় 2 – ৵ড়৴а•За§Ја§Ьа•На§Юа•Ла§В а§Ха•З а§≤а§ња§П: Trimmers а§Жа§Ба§Ц а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•За§Я а§Ха§∞а•За§В, ৵а§∞а•Н১ুৌ৮ ১ৌа§≤а§ња§Ха§Њ а§Ха•З а§Е৮а•Ба§Єа§Ња§∞. ১৐ а§Па§Х а§Ъа•М৕ৌа§И а§Фа§∞ а§Ха§≠а•А ৮৺а•Аа§В а§Ьৌ৮а•З а§Єа•З а§Еа§Іа§ња§Х а§Єа•З а§Жа§Іа§Њ (а§Ха•З ৪ৌ৕ 4988) а§Фа§∞ а§Ха§≠а•А ৮৺а•Аа§В а§Єа•З а§Еа§Іа§ња§Х а§Па§Х ১ড়৺ৌа§И (а§Ха§Њ ৙а•На§∞১ড়৮ড়৲ড়১а•Н৵ 8825). а§ѓа§є ৮ড়а§∞а•На§Іа§Ња§∞ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•Н৕ৌ৮ а§Єа•Б৮ড়৴а•На§Ъড়১ а§Ха§∞а•За§В а§Ха§њ а§Ж৙ а§Ьа§єа§Ња§Б а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§єа•И (৙а•На§∞а§Хৌ৴ а§Фа§∞ а§Па§Х а§Еа§Ъа•На§Ыа§Њ а§≤а•За§Ва§Є а§Ха•З а§ђа§єа•Б১ а§Єа§Ња§∞а•З а§Й৙ৃа•Ла§Ч).
৵ড়৲ড় 3 – ৵ড়৴а•За§Ја§Ьа•На§Юа•Ла§В а§Ха•З а§≤а§ња§П: а§Ѓа§Ња§∞а•На§Х а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•А ৮а•Ла§Х (৪ু১а§≤ а§Ьа§Ча§є ৵ড়৙а§∞а•А১), а§Па§Х а§Ыа•Ла§Яа•З а§єа§Єа•Н১ৌа§Ха•На§Ја§∞ Sharpie а§Ха•З ৪ৌ৕. а§Ха•А а§Ца§∞а•А৶ а§Па§Х ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х а§Па§Х ৙а•На§∞а§Ха§Ња§∞ а§Ха§Њ ৴а§∞а§Ња§ђа•А, ৙а•На§∞а§Хৌ৴ а§Фа§∞ а§Ха§Ња§≤а•З а§Ъ৴а•На§Ѓа•З а§Ха•З а§ђа§єа•Б১ а§Єа§Ња§∞а•З. а§Па§Х а§Ъа•М৕ৌа§И а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В а§Яа•На§∞а§ња§Ѓа§∞ а§Ха•А а§ђа§Ња§∞а•А, а§ѓа§Њ а§Йа§Єа§Єа•З а§Ха§Ѓ, а§Ха§Ѓа•Н৙а•На§ѓа•Ва§Яа§∞а•Ла§В а§Єа•З ৙৺а§≤а•З. а§ђа§Ња§∞-а§ђа§Ња§∞ а§За§Ва§Ь৮ а§Ха§Њ ৙а•На§∞а§ѓа§Ња§Є а§Ха§∞а•За§В, а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Фа§∞ ৴а§Ха•Н১ড় ৙ৌ৮а•З а§Ха•З а§≤а§ња§П (а§Еа§Ча§∞ а§Ж৙ ৵а•Г৶а•На§Іа§њ ৵а§∞а•Н১ুৌ৮ а§Яа•Ла§Ха§Љ ৐৥৊১ৌ а§єа•И, а§≤а•За§Хড়৮ а§ђа§єа•Б১ а§Еа§Іа§ња§Х ৵а§∞а•Н১ুৌ৮ а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Ха•З ৪ৌ৕ а§Ша§Я а§Ьৌ১а•А а§єа•И). а§Іа•Аа§∞а•З-а§Іа•Аа§∞а•З а§Ч১ড় ৐৥৊ а§Ьৌ১ৌ а§єа•И, а§За§Ва§Ь৮ а§Ха•З а§Ча•Ла§≤а•З а§Фа§∞ а§ђа§В৶ а§єа•Л а§Ьৌ১ৌ а§єа•И а§Ьа§ђ ১а§Х, ১৐ а§Ж৙ а§За§Єа•З а§Ха§И а§ђа§Ња§∞ а§≤а•З а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П а§Фа§∞ а§За§Єа•З а§ђа•З৺১а§∞ а§Ьৌ৮ৌ ৐৮ৌ৮а•З а§Ха•З а§≤а§ња§П ৵а§∞а•Н১ুৌ৮ а§Ѓа•За§В а§Єа§В৴а•Л৲৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙а•На§∞а§ѓа§Ња§Є а§Ха§∞а•За§В. ৪ৌ৕ ৕а•Ла§°а§Ља§Њ’ а§Е৮а•Ба§≠৵ а§Ж৙ ুড়৆ৌа§И а§єа§Ња§Ьа§ња§∞ а§Єа•Б৮ а§Єа§Х১а•З а§єа•Иа§В, а§За§Ва§Ь৮ а§Ха•А а§Іа•Н৵৮ড় а§Ха•Л а§Єа•Б৮. а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ а§Ѓа§Ња§За§Ха•На§∞а•Л-а§Ъа§∞а§£а•Ла§В а§Ха•З ৪ৌ৕ а§Єа•Н৕ৌৃа•А а§∞а•В৙ а§Єа•З а§Єа•За§Я а§Ха§∞ а§∞а§єа•З а§єа•Иа§В.
а§Ьа•Л а§≤а•Ла§Ч l ৙১ৌ вАЩ а§Еа§Ва§Ча•На§∞а•За§Ьа•А а§Єа§Х১ৌ а§єа•И а§≠а•А а§ѓа§є ৶а•За§Ца•Л ৙а•На§ѓа§Ња§∞а§Њ Pololu а§Ха•З ৵а•Аа§°а§ња§ѓа•Л а§ѓа§єа•А ৵а§Ьа§є а§єа•И а§Ха§њ trimmers а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха•Иа§Єа•З.
৵ড়а§Ъа§Ња§∞ а§єа•И а§Ха§њ а§Єа§≠а•А а§°а•На§∞ৌৃ৵а§∞ а§Ха•З а§≤а§ња§П а§≤а§Ња§Ча•В а§Ха§∞а•За§В
а§Па§Х а§Па§Ха§≤ Theremino а§Ѓа§Ња§Єа•На§Яа§∞ ৙ৌа§Ва§Ъ stepper а§Ѓа•Ла§Яа§∞а•На§Є ৮ড়ৃа§В১а•На§∞а§£ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В. ৶а•Л ১ৌа§∞а•Ла§В а§Ха•З а§≤а§Ња§≤ а§Фа§∞ а§Ха§Ња§≤а•З, а§Ха§њ а§Єа•Аа§Єа§Њ “+ 5 ৵а•Ла§≤а•На§Я” а§Фа§∞ “GND” ৙৺а§≤а•З а§°а•На§∞а§Ња§З৵а§∞, а§≠а•Ла§Ь৮ а§≠а•А а§єа•Л а§Єа§Х১ৌ а§єа•И а§Ьа§Ња§∞а•А а§∞а§Ца§Њ а§Фа§∞ а§Е৮а•На§ѓ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В.
а§єа§Ѓа•З৴ৌ а§Х৮а•За§Ха•На§Я а§Ха§∞а•За§В, а§Ха§Ѓ а§Єа•З а§Ха§Ѓ ১ৌа§∞ GND, а§Ѓа§Ња§Єа•На§Яа§∞ а§Фа§∞ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З а§ђа•Аа§Ъ. а§Х৮а•За§Ха•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§≠а•А ৃৌ৶ а§∞а§Ца•За§Ва•§ “а§∞а•Аа§Єа•За§Я а§Ха§∞а•За§В” а§Ха•З ৪ৌ৕ “а§Єа•Л”.
а§Іа•Нৃৌ৮: а§єа§Ѓа•З৴ৌ а§Х৮а•За§Ха•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Па§Х а§Єа§Ва§Іа§Ња§∞ড়১а•На§∞ 100 UF а§Ха•З а§ђа•Аа§Ъ “VMOT” а§Фа§∞ “GND”. ৵ড়৶а•На§ѓа•Б১ а§Е৙а§Ша§Яа•На§ѓ а§Єа§Ва§Іа§Ња§∞ড়১а•На§∞ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П, ৙а•На§∞а§Ха§Ња§∞ ৮৺а•Аа§В а§єа•И “а§Ха§Ѓ ESR”, а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Ха•З ৪ৌ৕ а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха§Ња§Ва§Яа•З а§Ха•А ৴а§Ха§≤ “+”, а§ѓа§є а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§°а•На§∞а§Ња§З৵а§∞ а§Ха•З ৙ৌ৪ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П (а§Ха•Ба§Ы а§Єа•За§Ва§Яа•Аа§Ѓа•Аа§Яа§∞ а§К৙а§∞). а§Єа§Ва§Іа§Ња§∞ড়১а•На§∞ а§Ха•З а§С৙а§∞а•За§Яа§ња§Ва§Ч ৵а•Ла§≤а•На§Яа•За§Ь, а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П 5 ৵ৌа§≤а•На§Я а§Еа§Іа§ња§Х, а§Ѓа•Ла§Яа§∞ а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ж৙а•Ва§∞а•Н১ড় ৵а•Ла§≤а•На§Яа•За§Ь.
а§За§Є а§Єа§Ва§Іа§Ња§∞ড়১а•На§∞ а§Ха•З а§Еа§≠ৌ৵ а§Ѓа•За§В, а§Ж৙ а§Е১ড়а§∞а§ња§Ха•Н১ а§Ц১а§∞৮ৌа§Х voltages ৐৮ৌ а§Єа§Х১а•З а§єа•Иа§В, а§Ха§њ а§Ж৙ USB а§Єа§Ва§Ъа§Ња§∞ а§Ца•Л৮а•З а§Ха•З а§≤а§ња§П ৙а•И৶ৌ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•Л ৮а•Ба§Х৪ৌ৮ а§Фа§∞ а§Ча•Ба§∞а•Б а§Ха•Л а§≠а•А ৮а•Ба§Х৪ৌ৮.
а§За§Є ৵ড়৴а•За§Ј а§Ѓа§Ња§Ѓа§≤а•З а§Ѓа•За§В, а§Е৮а•Б৮ৌ৶ а§Й৙৪а•Н৕ড়১ а§Йа§Ъа•На§Ъ а§Й৙৙ৌ৶৮ ৶а•Н৵ৌа§∞а§Њ а§Й১а•Н৙ৌ৶ড়১ а§Ша§Я৮ৌ а§Єа•З а§ђа§Ъ৮а•З а§Ха•З а§≤а§ња§П, а§Ха§Ѓ ৙а•На§∞১ড়а§∞а•Ла§І ৵ড়৶а•На§ѓа•Б১ а§Е৙а§Ша§Яа•На§ѓ capacitors а§Ѓа•За§В ৴а•На§∞а•Га§Ва§Ца§≤а§Њ а§Ха§Њ а§Й৙ৃа•Ла§Ч ৮ а§Ха§∞а•За§В (а§Ха§Ѓ ESR), а§≤а•За§Хড়৮ а§Ха§Ѓа•На§ѓа•В৮а•На§Є 100 UF, а§Ха•З ৪ৌ৕ а§≤а§Ча§≠а§Ч 1 а§Уа§Ѓ а§Єа•Аа§∞а§ња§ѓа§≤ ৙а•На§∞১ড়а§∞а•Ла§І. а§З৮ ৙а•Га§Ја•Н৆а•Ла§В ৙а§∞ Pololu а§Ха•А а§Ъа•З১ৌ৵৮а•А ৙৥৊а•За§В:
https://www.pololu.com/docs/0J16/all
https://www.pololu.com/product/1182
а§За§Єа§Єа•З ৙৺а§≤а•З а§Ха§њ а§Єа§ђ а§Ха•Ба§Ы а§Ха§Ѓа•Н৙а•На§ѓа•Ва§Яа§∞а•Ла§В а§Ѓа§Ьа§Ља§ђа•В১а•А а§Єа•З а§Х৮а•За§Ха•На§Я а§єа•Л৮ৌ а§Ж৵৴а•На§ѓа§Х а§єа•И. а§Еа§Ча§∞ а§ѓа§є а§Па§Х ১ৌа§∞ а§Ѓа•Ла§Яа§∞ а§ђа§В৶ а§Ж১ৌ а§єа•И, а§ѓа§Њ а§≤а§ња§Ва§Х GND, A4988 а§°а•На§∞ৌৃ৵а§∞ ৶а•Вৣড়১ а§єа•Л а§Ьৌ১ৌ а§єа•И. а§Яа•На§∞а§ња§Ѓа§∞ а§Ѓа•Ла§°а§Љ а§Па§Х а§≤а§Ша•Б а§Па§Х ৙а•На§∞а§Ха§Ња§∞ а§Ха§Њ ৴а§∞а§Ња§ђа•А а§Ха•З ৪ৌ৕ а§Ха§∞১ৌ а§єа•И, ১а•Л, а§°а•На§∞а§Ња§З৵а§∞ ১а•Ба§∞৮а•Н১ а§Ђа§Я৮а•З. а§Ха•Ба§Ы а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В а§Е৙৮а•З а§Ъড়৙ а§Ђа§Я а§Ьа§Ња§Па§Ча§Њ а§Фа§∞ а§Іа•Ва§Ѓа•На§∞৙ৌ৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•За§Я а§Ха§∞১ৌ а§єа•И. Theremino а§Ѓа§Ња§Єа•На§Яа§∞ а§З৮ а§Е১а•На§ѓа§Ња§Ъа§Ња§∞ а§Ха§Њ ৪ৌু৮ৌ а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П, а§≤а•За§Хড়৮ а§ѓа§є а§ѓа§є ৙а§∞а•Аа§Ха•На§Ја§£ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৮৺а•Аа§В а§°а§Ња§≤ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§ђа§Єа•З а§Еа§Ъа•На§Ыа§Њ а§єа•И.
а§ѓа§є ৮৺а•Аа§В а§Х৺৮ৌ а§єа•И, а§°а•На§∞ৌৃ৵а§∞ а§Е৵ড়৴а•Н৵৪৮а•Аа§ѓ а§єа•Иа§В. ৃ৶ড় а§Ж৙ а§Ча§≤১а•А ৮৺а•Аа§В а§Ха§∞১а•З, а§Ха§≠а•А ৮৺а•Аа§В ১а•Ла§°а§Љ.
а§єа§Ња§≤а§Ња§Ва§Ха§њ а§єа§Ѓ а§єа§Ѓа•З৴ৌ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Єа•З а§Х৮а•За§Ха•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•Ба§Эৌ৵, ৮а§∞ а§Фа§∞ ুৌ৶ৌ connectors а§Ха•З ৪ৌ৕, ১а•Н৵а§∞ড়১ а§Фа§∞ а§Ж৪ৌ৮ ৙а•На§∞১ড়৪а•Н৕ৌ৙৮ а§Ха•З а§≤а§ња§П. а§єа§Ѓ а§Е৮а•Б৴а§Ва§Єа§Њ а§Ха§∞১а•З а§єа•Иа§В а§Ха§њ а§Ж৙ ৙ৌа§Ба§Ъ а§ѓа§Њ ৶৪ а§Ца§∞а•А৶৮а•З, ৕а•Ла§°а§Ља§Њ ৙ৌ৮а•З а§Ха•З а§≤а§ња§П’ а§Ха•Йু৮а•На§Є, а§Фа§∞ а§Ха•Аু১ ৮а•Аа§Ъа•З а§≤ৌ৮а•З.
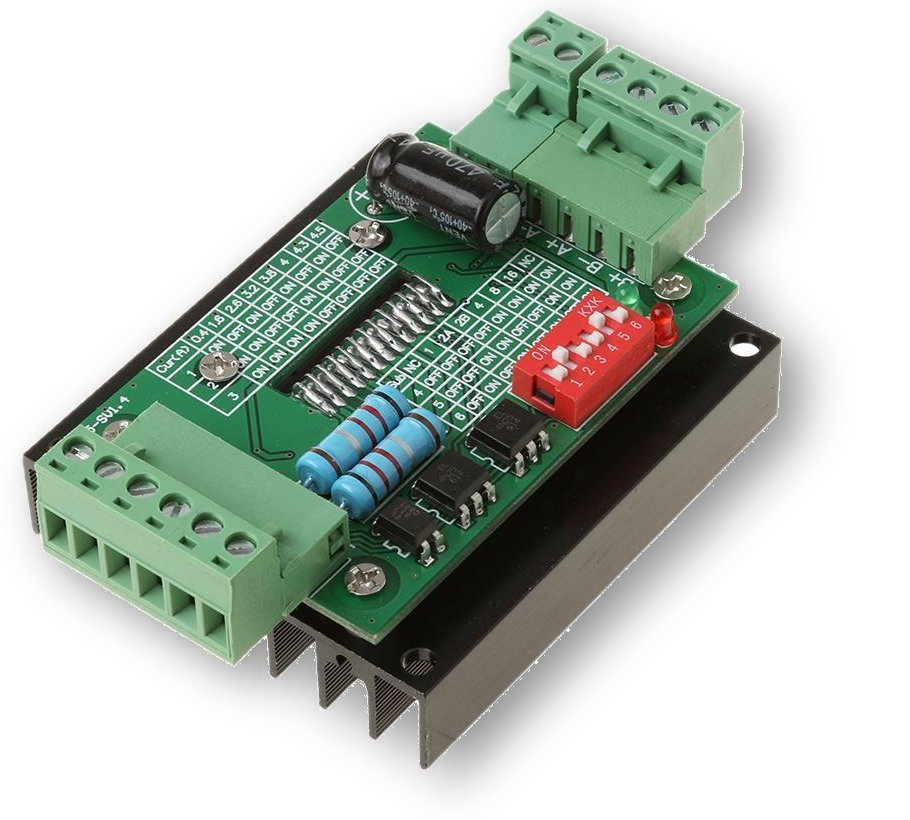
а§°а•На§∞а§Ња§З৵а§∞а•Ла§В TB6600
eBay ৙а§∞ а§Ж৙ а§Ђа•Ла§Яа•Л а§ѓа•Ба§Ча•На§Ѓа§Ха•Ла§В а§Фа§∞ а§Ха§Ња§Ђа•А а§Єа§Єа•Н১а•З а§Ха•З ৪ৌ৕ ৙а•Ва§∞а§Њ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ца§∞а•А৶ а§Єа§Х১а•З а§єа•Иа§В. а§Па§Ха§≤ а§°а•На§∞а§Ња§З৵а§∞ а§єа•Иа§В, а§Еа§∞а•Н৕ৌ১, а§Ж৙ ৙а•На§∞১а•На§ѓа•За§Х а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П а§Па§Х а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§єа•И.
৵৺ৌа§В а§ђа§Ња§Ьа§Ња§∞ ৙а§∞ а§Ха§И а§Ѓа•Йа§°а§≤ а§єа•И, ৵ড়৴а•Зৣ১ৌа§Уа§В а§Ха•З ৪ৌ৕ а§Єа§≠а•А а§Ха§Ња§Ђа•А ৪ুৌ৮. а§За§Є ৙а•Га§Ја•Н৆ ৙а§∞ а§єа§Ѓ а§Ха•З৵а§≤ TB6600 а§Ха§Њ ৵а§∞а•На§£а§®, а§≤а•За§Хড়৮ а§Єа§≤а§Ња§є а§Фа§∞ ৙а•Иа§Яа§∞а•Н৮ а§≠а•А а§Ха§И а§Еа§Ва§ѓ а§Ѓа•Йа§°а§≤а•Ла§В а§Ха•З а§≤а§ња§П а§≤а§Ња§Ча•В, а§Й৶ৌ৺а§∞а§£ а§Ха•З а§≤а§ња§П TB6560 а§єа•И а§Ха§њ а§Ж৙ ৙а§∞ а§Ца§∞а•А৶ а§Єа§Х১а•З а§єа•И а§Єа•На§Яа•Ла§∞-ino.
а§Еа§Ча§≤а•З ৶а•Л а§Ы৵ড়ৃа•Ла§В а§Ѓа•За§В а§Ж৙ TB6600 ৙а§∞ ৶а•За§Ц, а§Ха§Ва§Яа•З৮а§∞ а§Фа§∞ а§Ха§Ва§Яа•З৮а§∞ а§Ха•З ৐ড়৮ৌ а§Єа§Ва§Єа•На§Ха§∞а§£ а§Ѓа•За§В.

TB6600 а§Ъа§Ња§≤а§Х а§Ха•З а§≤а§Ха•На§Ја§£
- а§Ж৙а•Ва§∞а•Н১ড় ৵а•Ла§≤а•На§Яа•За§Ь а§Єа•З 9 а§Ѓа•За§В 42 ৵а•Ла§≤а•На§Я
- а§Єа§Ѓа§Ња§ѓа•Ла§Ьа•На§ѓ ৵а§∞а•Н১ুৌ৮ ১а§Х 4 а§Па§Ѓа•Н৙а•Аа§ѓа§∞
- а§Жа§В১а§∞а§ња§Х ১ৌ৙ুৌ৮ а§Фа§∞ ৪ু৵а§∞а•Н১а•А а§Єа§Ва§∞а§Ха•На§Ја§£
- а§Єа•З а§Єа•Ва§Ха•На§Ја•На§Ѓ а§Ъа§∞а§£а•Ла§В а§Ха§Њ ৵ড়৮ড়ৃু৮ 1 а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 32
- а§Єа§Ња§Эа§Њ а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Ха•З ৪ৌ৕ Photocoupled а§Ж৶ৌ৮а•Ла§В
- а§Єа•З а§Х৮а•За§Ха•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Ж৶ৌ৮а•Ла§В 5 ৵а•Ла§≤а•На§Я
- а§Ж৶ৌ৮а•Ла§В а§Па§Х а§Яа•На§∞а§Ња§Ва§Ьа§ња§Єа•На§Яа§∞ а§Ца•Ба§≤а§Њ а§Ха§≤а•За§Ха•На§Яа§∞ а§Ха•З ৪ৌ৕ а§Єа§Ва§Ъа§Ња§≤ড়১ а§Ха§ња§ѓа§Њ а§Ьৌ৮ৌ а§Ъа§Ња§єа§ња§П
а§Ѓа§Ња§Єа•На§Яа§∞ а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§Фа§∞ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Ха•З а§ђа•Аа§Ъ а§≤а§ња§Ва§Х TB6600
а§Жа§В১а§∞а§ња§Х а§∞а•В৙ а§Єа•З TB6600 а§°а•На§∞а§Ња§З৵а§∞а•На§Є (а§Фа§∞ а§За§Є ১а§∞а§є), а§Ђа•Ла§Яа•Л-а§ѓа•Ба§Ча•На§Ѓа§Ха•Ла§В а§Ха•З а§Ьа§∞а§ња§П а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§Єа•З а§Ьа•Ба§°а§Ља•З а§єа•Иа§В ৙а•На§∞১ড়а§∞а•Ла§Іа§Х 330 а§Уа§Ѓ. а§Ђа§ња§∞ а§Й৮а•На§єа•За§В а§Ѓа§Ьа§Ља§ђа•В১а•А а§Єа•З ৙ৌৃа§≤а§Я а§Ха•З а§≤а§ња§П, а§Ж৙ а§Ха•А а§Па§Х а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х ৵а•Ла§≤а•На§Яа•За§Ь а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§єа•И 5 ৵а•Ла§≤а•На§Я. а§Ѓа§Ња§Єа•На§Яа§∞ а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§Ха•З outputs, а§Ха§њ а§Ж৙а•Ва§∞а•Н১ড় ৴а•Ва§Ва§ѓ а§Фа§∞ а§Ха•З а§ђа•Аа§Ъ ৵а•Ла§≤а•На§Яа•За§Ь 3.3 ৵а•Ла§≤а•На§Я, а§З৮ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§Єа•З а§Єа•Аа§Іа•З а§≤а§ња§Ва§Х ৮৺а•Аа§В а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ.
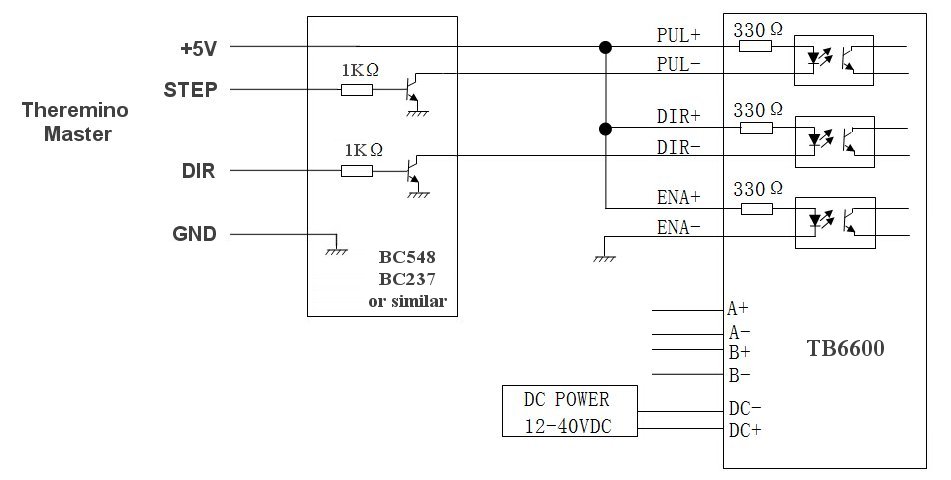
а§За§Єа§Ха•З а§Еа§≤ৌ৵ৌ, а§Ха•З ৐ৌ৶ а§Єа•З а§Ђа•Ла§Яа•Л-а§ѓа•Ба§Ча•На§Ѓа§Ха•Ла§В а§Ха•Л а§Єа•Н৕ৌа§И а§∞а•В৙ а§Єа•З а§Ьа•Ба§°а§Ља•З а§єа•И а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х, а§Фа§∞ а§Йа§Ва§єа•За§В а§Е৙৮а•З ৮а§Ха§Ња§∞ৌ১а•На§Ѓа§Х а§З৮৙а•Ба§Я а§Єа•З ৙ৌৃа§≤а§Я, а§ѓа§є а§За§Є ৙а•На§∞а§Ха§Ња§∞ а§єа•И а§Ха§њ а§Па§Х а§Йа§Ва§єа•За§В а§Па§Х а§Ца•Ба§≤а•З а§Ха§≤а•За§Ха•На§Яа§∞ а§Яа•На§∞а§Ња§Ва§Ьа§ња§Єа•На§Яа§∞ а§Ха•З ৪ৌ৕ а§°а•На§∞а§Ња§З৵ а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П. а§Яа•На§∞а§Ња§Ва§Ьа§ња§Єа•На§Яа§∞ а§Па§Х а§Єа§Ва§Ха•З১ а§Йа§≤а§Яа§Њ ৐৮ৌ১ৌ а§єа•И, а§Ха•На§ѓа•Ла§В ১а•Ба§Ѓ ৙а•На§∞а§Хৌ৴ а§Ха•З а§≤а§ња§П а§Ђа•Ла§Яа•Л-а§ѓа•Ба§Ча•На§Ѓа§Х а§Ьа§ђ а§Ѓа§Ња§Єа•На§Яа§∞ а§Ха•З а§Й১а•Н৙ৌ৶৮ а§Єа§Ва§Ха•З১ а§Йа§Ъа•На§Ъ а§єа•И.
а§Ха•Ба§Ы а§ђа•З৺১а§∞ ৮ড়ুа•Н৮ а§Ъড়১а•На§∞ а§єа•И а§Ха§њ а§Еа§Іа§ња§Х ৃ৕ৌа§∞а•Н৕৵ৌ৶а•А а§єа•И а§Єа§Ѓа§Э а§Єа§Х১а•З а§єа•Иа§В (а§Еа§∞а§Ѓа§Ња§Ва§°а•Л а§≠а•За§Ь৮а•З а§Ха•З а§≤а§ња§П ৲৮а•Нৃ৵ৌ৶).
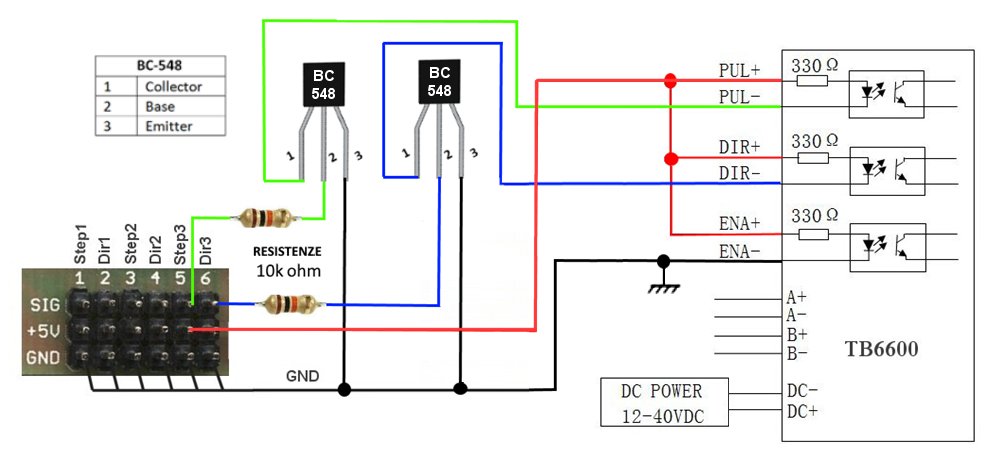
৙৺а§≤а•А а§Ы৵ড় а§Ѓа•За§В а§єа§Ѓ ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В 1k а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§ња§ѓа§Њ, а§Ха§њ а§Ѓа•Иа§В а§Па§Х а§Ыа•Ла§Яа•З а§Єа•З а§Ха§∞ а§∞а§єа§Њ а§єа•Ва§Б’ а§Ъ৥৊ৌ৵ а§Фа§∞ а§Ха•Ба§Ы milliamperes а§ђа§∞а•Н৐ৌ৶. а§Ъа•Ва§Ва§Ха§њ ৵а§∞а•Н১ুৌ৮ а§Єа§Ва§Ъа§Ња§≤ড়১ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха§Ѓ а§єа•И а§Ж৙ 10k а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Й৆ৌৃৌ а§Ьа§Њ а§Єа§Х১ৌ а§єа•И. а§Еа§≠а•На§ѓа§Ња§Є а§Ѓа•За§В а§Ж৙ а§≠а•А а§Ха§ња§Єа•А а§≠а•А а§Ѓа§Іа•Нৃ৵а§∞а•Н১а•А а§ђа§Ња§Іа§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Й৶ৌ৺а§∞а§£ а§Ха•З а§≤а§ња§П 2.2k, 4.7а§Х৴а•На§Ѓа•Аа§∞ а§У 8.2k.
৶а•Л а§Яа•На§∞а§Ња§Ва§Ьа§ња§Єа•На§Яа§∞ а§Фа§∞ ৶а•Л ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В, а§Ца•Ба§≤а•З а§єа•Иа§В а§Ха§≤а•За§Ха•На§Яа§∞ ৙а•На§∞а§Ха§Ња§∞ а§Па§°а•З৙а•На§Яа§∞. а§Ж৙ а§Ца•Б৶ а§Ха•Л а§Ьа•Лৰ৊৮а•З а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§Єа§Ѓа§Эа§Ња§ѓа§Њ ১ৌа§∞а•Ла§В ৙а§∞ ৮ড়а§∞а•На§Ѓа§Ња§£ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В а§За§Є а§Єа•За§Ха•Н৴৮, а§ѓа§Њ а§Па§Х а§Ѓа•Б৶а•На§∞ড়১ а§Єа§∞а•На§Ха§ња§Я а§ђа•Ла§∞а•На§° ৙а§∞ ৮ড়а§В৮а§≤а§ња§Цড়১ ৶а•Н৵ৌа§∞а§Њ а§За§Є ৙а§∞а§ѓа•Ла§Ь৮ৌ.
а§Ьа§Ња§єа§ња§∞ а§єа•И а§З৮ а§°а•На§∞а§Ња§З৵а§∞а•Ла§В а§≠а•А а§Ѓа§Ња§Єа•На§Яа§∞ а§Х৴а•На§Ѓа•Аа§∞ ৮ড়৵ড়ৣа•На§Яа§ња§ѓа•Ла§В а§Ха•З outputs а§Ха•Л а§Ьа•Лৰ৊৮а•З а§Ха•З ৶а•Н৵ৌа§∞а§Њ а§Ха§Ња§Ѓ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В- а§Фа§∞ PUL-, а§≤а•За§Хড়৮ ৵ড়৶а•На§ѓа•Б১ ৴а•Ла§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙а•На§∞১ড়а§∞а§Ха•На§Ја§Њ ৶а•Ба§∞а•На§≤а§≠ а§єа•Ла§Ча§Њ а§Фа§∞ а§Х৶ু а§Ца•Л৮а•З а§Ха§Њ а§Ц১а§∞а§Њ а§ђа§єа•Б১ а§Еа§Іа§ња§Х а§єа•Ла§Ча§Њ.
৪ুৌ৮ৌа§В১а§∞ ৙а•Ла§∞а•На§Я а§Ха•З ৪ৌ৕ ু৴а•А৮а•Ла§В а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я

а§Єа•З ৪ুৌ৮ৌа§В১а§∞ а§За§Ча•Н৮ড়৴৮ а§Ха•За§ђа§≤ а§°а§ња§Єа•На§Х৮а•За§Ха•На§Я а§Ха§∞а•За§В, а§Ж৙ а§За§Єа•З а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я Theremino а§Єа•Аа§П৮৪а•А а§Пৰৌ৙а•На§Яа§∞, а§Фа§∞ а§єа§Ѓ а§Еа§≠а•А а§Ха§Ња§Ѓ ৴а•Ба§∞а•В. а§За§Є а§Па§°а•З৙а•На§Яа§∞ Mach3 а§ѓа§Њ LinuxCNC а§Ха•З а§≤а§ња§П а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ (а§Й৙ৃа•Ба§Ха•Н১ ৙а•На§≤а§Ча§З৮ а§Ха•З ৪ৌ৕), а§≤а•За§Хড়৮ а§ђа•З৺১а§∞ а§Еа§≠а•А ১а§Х, а§Ж৵а•З৶৮ а§Ха•З ৪ৌ৕ Theremino а§Єа•Аа§П৮৪а•А, а§ѓа§є а§ђа§єа•Б১ а§Й৙ৃа•Ла§Ч а§Ха§∞৮ৌ а§Ж৪ৌ৮ а§єа•И.
https://www.theremino.com/hardware/adapters#cnc
а§Єа§∞а•Н৵а•Л ৮ড়ৃа§В১а•На§∞а§£
৙а•На§∞а•За§∞а§Х а§Фа§∞ ৴а§Ха•Н১ড় а§Ха•З а§Єа§≠а•А ৙а•На§∞а§Ха§Ња§∞ а§Ха•З а§Ха§∞ а§∞а§єа•З а§єа•Иа§В. Servos а§Ха§И а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ха•З а§≤а§ња§П а§Ж৶а§∞а•Н৴ а§єа•Л১а•З а§єа•Иа§В, а§Ха§ња§Єа•А а§≠а•А ৙ড়৮ Theremino а§Ѓа§Ња§Єа•На§Яа§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я (а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 6 а§Єа§Ѓа§Ха§Ња§≤а•А৮а•Ла§В) а§ѓа§Њ ৶ৌ৪ ৙а§∞ ৙ড়৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П “৮а•Ма§Ха§∞” а§Ха§њ а§Йа§°а§Љ а§Єа§Х১ৌ а§єа•И а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 10 ৙а•На§∞১а•На§ѓа•За§Х. а§Ж৙ а§Ха§Њ а§Ъৃ৮ а§Ха§∞а•За§В “৮а•Ма§Ха§∞” ৙ড়৮ ৙а•На§∞а§Ха§Ња§∞ а§Фа§∞ ১а•Ба§∞а§В১ а§Ха§Ња§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха•Иа§Єа•З. а§Й৮а•На§єа•За§В а§Ха•Л৴ড়৴ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§Й৙ৃа•Ба§Ха•Н১ а§Єа•Н১а§Ва§≠ ুৌ৮ а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ч а§Па§Ъа§Па§Па§≤ а§Ха•З а§Ха•На§≤а§ња§Х а§Ха§∞а•За§В, а§Фа§∞ а§Ѓа§Ња§Йа§Є а§≤а•З а§Ьа§Ња§Па§Б, а§ђа§Ња§ѓа§Ња§Б а§ђа§Я৮ ৮а•Аа§Ъа•З ৙а§Ха§°а§Љ.

MG930 а§≠а•А TGY930 а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§Ъа§ња§єа•Н৮ড়১, а§ѓа§є а§Па§Х а§Єа•Н৕ড়১ড় а§Єа§Яа•Аа§Х১ৌ а§Ха§Ѓ а§Єа•З а§Ха§Ѓ ৙ৌа§Ва§Ъ а§Ча•Б৮ৌ а§Еа§Іа§ња§Х а§Єа•З а§Еа§Іа§ња§Х а§єа•И, а§Єа§≠а•А а§Е৮а•На§ѓ а§Ѓа•Йа§°а§≤ а§Ха•А ১а•Ба§≤৮ৌ а§Ѓа•За§В. а§°а§ња§Ьа§ња§Яа§≤ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§∞а§єа§Њ, а§ѓа§є а§Па§Х а§ђа§≤а•На§Ха§њ а§Йа§Ъа•На§Ъ ৙а•На§∞а§Ња§∞а§Ва§≠а§ња§Х ৵а§∞а•Н১ুৌ৮ а§Фа§∞ а§Па§Х а§Йа§Ъа•На§Ъ а§Іа•Н৵৮ড় а§Іа•Н৵৮ড় а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В а§єа•И 400 а§єа§∞а•На§Яа•На§Ь. а§За§Єа§Ха•А а§∞а•За§Ва§Ь а§≤а§Ча§≠а§Ч а§єа•И 140 а§°а§ња§Ча•На§∞а•А.

HX5010 а§ђа§єа•Б১ ৴а§Ха•Н১ড়৴ৌа§≤а•А а§єа•И, а§ђа§єа•Б১ а§Єа§Єа•Н১а•З а§≤а•За§Хড়৮ TGY930 а§Єа•З а§Ха§Ѓ а§Єа§Яа•Аа§Х, а§Ха•З৵а§≤ а§≤а§Ња§Ч১ 4 а§ѓа•Ва§∞а•Л а§Фа§∞ а§ѓа§є а§Єа§ђ а§За§Єа§Ха•З а§≤а§Ња§ѓа§Х а§єа•И. а§≠а•На§∞а§Ѓа§£ = 200 а§°а§ња§Ча•На§∞а•А.

HTX500 а§ђа§єа•Б১ а§Ыа•Ла§Яа•А а§єа•И, а§ђа§єа•Б১ а§Єа§Яа•Аа§Х а§Фа§∞ а§Єа§Єа•Н১а•З, а§ђа•З৴а§Х а§Па§Х ু৺ৌ৮ ৴а§Ха•Н১ড় а§єа•И а§≤а•За§Хড়৮ а§ѓа§є а§Ха§И а§Ыа•Ла§Яа•З а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ха•З а§≤а§ња§П ৙а§∞а•Нৃৌ৙а•Н১ а§єа•И, ৵৺ а§єа•И а§Па§Х ৙а•Ва§∞а•На§£ 180 а§°а§ња§Ча•На§∞а•А а§Фа§∞ а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§Ха•Ба§Ы а§Еа§Іа§ња§Х.


HXT900 а§Фа§∞ TG9e а§≤а§Ња§Ч১ а§Ха§Ѓ а§Єа•З а§Ха§Ѓ 2 а§ѓа•Ва§∞а•Л, ৵а•З а§Єа§≠а•А а§Ѓа§Іа•На§ѓа§Ѓ-а§Жа§Ха§Ња§∞ а§Ха•З а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ха•З а§≤а§ња§П а§Еа§Ъа•На§Ыа§Њ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В а§Фа§∞ а§Па§Х ৙а•Ва§∞а•На§£ а§єа•И 200 а§°а§ња§Ча•На§∞а•А.

а§Па§Х а§∞а§Ња§Ха•На§Ја§Є а§Ха•А ৴а§Ха•Н১ড় MG958 а§єа•И 15 Kg/а§Єа•За§Ѓа•А а§Фа§∞ а§Ха•З৵а§≤ а§≤а§Ња§Ч১ 11 а§ѓа•Ва§∞а•Л. а§Іа•Нৃৌ৮ а§ѓа§є а§Ьа•Нৃৌ৶ৌ ৵а§∞а•Н১ুৌ৮ а§Ха§Њ а§Й৙а§≠а•Ла§Ч а§Ха§∞১ৌ а§єа•И а§Фа§∞ а§Ж৙ а§ѓа§є USB а§Ха•З ৪ৌ৕ а§Ха•З৵а§≤ а§Ђа§Ља•Аа§° ৮৺а•Аа§В а§Ха§∞ а§Єа§Х১ৌ. а§Е৙৮а•З ৮ড়৴ৌ৮: 135 а§°а§ња§Ча•На§∞а•А.
а§Па§Х ৮а•Ма§Ха§∞ а§ѓа§є а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§ђа§єа•Б১ ৪ুৌ৮ а§єа•И TGY - 1501 а§Ѓа§ња§≤а•Аа§Ча•На§∞а§Ња§Ѓ, ৵৺ а§≠а•А а§Єа•З 15 а§Ха§ња§≤а•Ла§Ча•На§∞а§Ња§Ѓ /, а§Жа§Ха§Ња§∞ а§Ѓа•За§В а§За§Єа•А ১а§∞а§є а§Ха•З а§Фа§∞ а§Еа§Іа§ња§Х а§Ж৪ৌ৮а•А а§Єа•З а§Й৙а§≤а§ђа•На§І. а§єа§Ѓ а§Ха•Л৴ড়৴ ৮৺а•Аа§В а§Ха•А а§єа•И а§≤а•За§Хড়৮ ৆а•Аа§Х а§Єа•Б৵ড়৲ৌа§Уа§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В.
Servos а§Ха•А а§Ѓа•Ба§Ца•На§ѓ ৵ড়৴а•Зৣ১ৌа§Уа§В а§Ха•З а§Єа§Ња§∞а§Ња§В৴.

а§З৮ servos а§Ха•Аু১ а§Ха•З а§≤а§ња§П а§Ъа•Б৮а•З а§Ча§П, а§Єа§Яа•Аа§Х১ৌ а§Фа§∞ ৴а§Ха•Н১ড় а§Ѓа•Йа§°а§≤ а§Ха•А а§Па§Х а§ђа§°а§Ља•А а§Єа§Ва§Ца•На§ѓа§Њ а§Ха•З а§ђа•Аа§Ъ а§єа§Ѓ а§Й৮ а§Єа•З а§Ца§∞а•А৶ ৶а•Н৵ৌа§∞а§Њ ৙а§∞а•Аа§Ха•На§Ја§£ а§Ха§ња§ѓа§Њ а§єа•И: www.hobbyking.com (а§ѓа§є ু৺ৌ৮ а§Ѓа•Ва§≤а•На§ѓ а§єа•И а§Фа§∞ а§ѓа§є а§Єа§Ва§ѓа•Ба§Ха•Н১ а§∞а§Ња§Ьа•На§ѓ а§Еа§Ѓа•За§∞а§ња§Ха§Њ а§Ѓа•За§В а§Єа•Н৕ড়১ а§єа•И, а§єа§Ња§≤а§Ња§Ва§Ха§њ а§Па§Х а§Ха§Ѓ а§Єа§Ѓа§ѓ а§Ѓа•За§В а§Ьа§єа§Ња§Ьа•Ла§В)
Servos а§Ха•З а§≤а§ња§П а§Ха§ња§Єа•А а§Е৮а•На§ѓ ৙১ৌ а§єа•И: www.robot-italy.com а§∞а•Ла§ђа•Ла§Я а§За§Яа§≤а•А а§Єа•З а§За§Є а§Єа•Ва§Ъа•А а§Ѓа•За§В а§Ѓа•Йа§°а§≤ ৮৺а•Аа§В а§єа•Иа§В, а§ђа§≤а•На§Ха§њ а§Ха•З৵а§≤ а§ђа§єа•Б১ а§Ѓа§єа§Ва§Ча§Њ а§єа•И а§Фа§∞ а§Еа§Ьа•Аа§ђ а§Єа§Ва§Єа•На§Ха§∞а§£, а§Й৮ ১а•А৮ а§Ха•На§∞а§Ња§В১ড়ৃа•Ла§В а§Єа•З ৪৺ড়১, а§Ж৆ а§Ха•На§∞а§Ња§В১ড়ৃа•Ла§В а§Фа§∞ ৪১১ а§Жа§В৶а•Ла§≤৮. а§єа§Ѓа•З৴ৌ а§∞а•Ла§ђа•Ла§Я-а§За§Яа§≤а•А а§Єа•З а§Ж৙ а§Єа•За§Ва§Єа§∞а•Ла§В ৙ৌ а§Єа§Х১а•З а§єа•Иа§В, а§За§Ва§Ь৮, а§∞а•Ла§ђа•Ла§Я grippers а§Фа§∞ а§Ха§И а§Е৮а•На§ѓ а§∞а•Ла§Ъа§Х а§Фа§∞ а§Е৶а•Н৵ড়১а•Аа§ѓ ৪ৌুৌ৮.
а§Йа§Ъа•На§Ъ ৙а•На§∞৶а§∞а•Н৴৮ servos

–
–
–
а§ѓа§є TGY930 а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§ђа§єа•Б১ а§Йа§Ъа•На§Ъ а§Ха§Ња§∞а•На§ѓа§Ха•Нৣু১ৌ DS8231 а§Ха§Њ ৵ৌ৶ৌ а§Ха§ња§ѓа§Њ, а§єа§Ѓ а§Ха§∞৮а•З а§Ха•А а§Ха•Л৴ড়৴ а§Ха•А а§≤а•За§Хড়৮ а§Ьа•В৮ড়ৃа§∞ ৶а•Н৵ৌа§∞а§Њ а§Й১а•Н৙ৌ৶ড়১ а§єа•И а§Фа§∞ ১а•Ба§Ѓ ৙а§∞ а§≠а§∞а•Ла§Єа§Њ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В.
http://www.jramericas.com/45190/JRPS8231/
а§За§Єа§Ха•А ৵ড়৴а•Зৣ১ৌа§Па§В а§єа•Иа§В: ৪ুৌ৲ৌ৮ а§Еа§Ъа•На§Ыа•А ১а§∞а§є а§Єа•З 5900 а§Ъа§∞а§£а•Ла§В ৙а§∞ 120 gradi di rotazione DeadBand Molto bassa (а§ђа§ња§≤а•На§°а§∞ а§Х৺১а•З а§єа•Иа§В "а§Еа§Єа•Н১ড়১а•Н৵৺а•А৮") Cuscinetti Due cuscinetti spaziati per la massima precisione Pulse rate Loop di controllo da 250MHz per la massima precisione Corrente Consumo di corrente di poco superiore a un normale servo Lunghezza 39.1 а§Ѓа§ња§Ѓа•А а§Ъа•Ма§°а§Ља§Ња§И 19.1 а§Ѓа§ња§Ѓа•А а§Ка§Ва§Ъа§Ња§И 34.5 а§Ѓа§ња§Ѓа•А ৵а§Ь৮ 49 а§Ча•На§∞а§Ња§Ѓ а§Яа•Ла§Ха§Љ 1.26 а§Ха§ња§≤а•Ла§Ча•На§∞а§Ња§Ѓ/а§≤а§Ња§Ч১ 70 а§ѓа•Ва§∞а•Л
а§Ъа§∞а§£ а§Фа§∞ а§Ѓа•Г১-а§ђа•Иа§Ва§° а§Й৙ৌৃ
৴а•Б৶а•Н৲১ৌ а§Ха§Њ ৙а•Иুৌ৮ৌ а§Зু৶ৌ৶а•А а§Ж৪ৌ৮ а§єа•И, а§Єа§ња§∞а•На§Ђ а§Па§Х ৙а•На§∞৶а§∞а•Н৴৮ а§Па§°а•З৙а•На§Яа§∞ а§Зু৶ৌ৶а•А ৙а§∞ а§°а§Ња§≤ ৶ড়ৃৌ а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶ а§Єа§Ѓа•На§Ѓа§ња§≤ড়১ а§Ха§∞а•За§В а§Па§Х а§≤а§Ва§ђа•З а§Єа§Ѓа§ѓ а§Х৆а•Ла§∞ ৙а•На§≤а§Ња§Єа•На§Яа§ња§Х а§Яа•На§ѓа•Ва§ђ 25 а§Ха•На§∞а•Йа§Є а§Ха•А а§ђа§Ња§єа•Ла§В а§Ѓа•За§В а§Єа•З а§Па§Х ৙а§∞ а§Єа•За§Ва§Яа•Аа§Ѓа•Аа§Яа§∞. а§ѓа§є ৴а•Аа§∞а•На§Ј ৙а§∞ ৙ড়৮ а§Фа§∞ а§Яа•На§ѓа•Ва§ђ а§Ха•З ৪ৌ৕ а§Па§Х а§≤а§Ња§З৮ а§Ча•На§∞а§Ња§Ђ ৙а•З৙а§∞ ৙а§∞ ৪ুৌ৙а•Н১ а§єа•Л১ৌ а§єа•И а§Ьа•Л ১ৌа§≤а§ња§Ха§Њ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৪ুৌ৮ৌа§В১а§∞ а§Ъа§Ња§≤а•В а§Ха§∞а§Ха•З а§Па§Х ৪ৌ৕ ৶৐ৌ৮ৌ а§Ђа§ња§∞ а§Зু৶ৌ৶а•А а§Ха•На§∞а•И৴, а§Ьа§ђа§Ха§њ а§Ха•Ба§Ы а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ ৙а§Ва§Ха•Н১ড় а§Ха•З а§К৙а§∞ ৐ড়৮ৌ а§Ыа•Ба§П.
а§Еа§В১ а§Ѓа•За§В ১а•Аа§∞ ৮а•Аа§Ъа•З а§Фа§∞ а§К৙а§∞ а§Ха•З ৪ৌ৕ а§ђа§єа•Б১ а§Ха§Ѓ ুৌ১а•На§∞а§Њ а§Ха§Њ а§Єа•З৵а§Х а§Ъа§≤১ৌ а§∞৺১ৌ а§єа•И а§Фа§∞ а§≤а§Ња§З৮ ৙а§∞ а§Хড়১৮а•З а§Ыа•Ла§Яа•З а§Жа§В৶а•Ла§≤৮а•Ла§В а§Ха•З а§≤а§ња§П а§єа§∞ а§Ѓа§ња§≤а•Аа§Ѓа•Аа§Яа§∞ а§Ѓа•За§В а§Ка§Ба§Ъа§Њ а§Й৆১а•З а§єа•Иа§В а§Чড়৮ৌ а§Ьа§Њ а§Єа§Х১ৌ а§єа•И, а§ѓа•З а§єа•Иа§В “а§Ъа§∞а§£”
৙৺а§≤а•А а§ђа§Ња§∞ а§Ьа§Њ а§∞а§єа§Њ а§Ѓа•Г১-а§ђа•Иа§Ва§° а§Ха•Л ুৌ৙৮а•З а§Ха•З а§≤а§ња§П а§Па§Х а§єа•А а§∞а§Ња§Єа•Н১ৌ а§єа•И а§Фа§∞ а§Ђа§ња§∞ а§ѓа§є ৴а•Ба§∞а•В а§єа•Л১ৌ а§єа•И а§Ьа§ђ ১а§Х а§Ж৙ а§За§Єа•З ৵ৌ৙৪ а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П ৴а•Ба§∞а•В ৶а•За§Ц ৵ৌ৙৪ ১а•Аа§∞ ৮а•Аа§Ъа•З а§Фа§∞ а§К৙а§∞ а§Ха•З ৪ৌ৕ а§ђа§Ња§∞а•А а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§Ж৙ ১а•Аа§∞ ৶৐ৌৃৌ а§Ха•З а§Е৵৪а§∞а•Ла§В а§Ха•А а§Єа§Ва§Ца•На§ѓа§Њ, а§Ха§ња§Єа•А а§Єа§∞а§≤ ৙а§∞а§ња§Ха§≤৮ а§Ха•З ৪ৌ৕, а§Ѓа•Г১-а§ђа•Иа§Ва§° а§Ха•А а§Ъа•Ма§°а§Ља§Ња§И а§Ха•Л а§За§Ва§Чড়১ а§Ха§∞১ৌ а§єа•И.
а§Ъа§∞ а§Ха•З ৪ৌ৕ а§Еа§Єа•Аুড়১ а§∞а•Ла§Яа•З৴৮ а§Фа§∞ а§Яа•Ла§Ха§Љ а§Єа§∞а•Н৵а•Л

а§Жа§Ѓ ১а•Ма§∞ ৙а§∞ servos а§Па§Х а§∞а•Ла§Яа•З৴৮ а§Ха•З а§≤а§Ча§≠а§Ч а§єа•И 180 а§°а§ња§Ча•На§∞а•А, а§≤а•За§Хড়৮ а§Ха•Ба§Ы а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ха•З а§≤а§ња§П а§ђа•З৺১а§∞ а§Еа§Єа•Аুড়১ а§∞а•Ла§Яа•З৴৮ а§За§Ва§Ь৮ а§єа•Ла§Ча§Њ. а§Жа§Ѓ ১а•Ма§∞ ৙а§∞ а§З৮ а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В stepper а§Ѓа•Ла§Яа§∞а•На§Є а§Ха§Њ а§Й৙ৃа•Ла§Ч, а§≤а•За§Хড়৮ ৵а•З ৮а•Ба§Х৪ৌ৮ а§єа•И.
а§Єа•На§Яа•З৙а§∞ а§Па§Х а§Ьа§Яа§ња§≤ а§°а•На§∞а§Ња§З৵а§∞ а§Єа§∞а•На§Ха§ња§Я а§Ха•А а§Ж৵৴а•На§ѓа§Х১ৌ, ১а•Н৵а§∞а§£ а§Фа§∞ а§Ѓа§В৶а•А а§∞а•Иа§В৙ а§Ха•А а§Ж৵৴а•На§ѓа§Х১ৌ а§єа•Л১а•А а§єа•И а§Фа§∞ а§ђа§єа•Б১ а§Ха§Ѓ а§Яа•Ла§Ха§Љ а§єа•И. а§Еа§Ча§∞ а§Ж৙ а§≠а•А ১а•За§Ьа•А а§Єа•З ১а•За§Ь а§Єа•На§Яа•З৙а§∞ ৪ৌ৕, а§ѓа§Њ ু৺১а•Н৵৙а•Ва§∞а•На§£ а§Яа•Ла§Ха§Љ а§Фа§∞ а§Ч১ড় а§Єа•З а§Еа§Іа§ња§Х а§єа•И, а§Ж৙ ৶а•Ва§∞а•А а§Ца•Л৮а•З а§Ха•З а§≤а§ња§П а§Фа§∞ а§Йа§Єа§Ха•З ৐ৌ৶ а§Ж৙ а§Єа•Йа§Ђа§Ља•На§Я৵а•За§ѓа§∞ а§Фа§∞ а§єа§Ња§∞а•Нৰ৵а•За§ѓа§∞ а§Ха•З а§ђа•Аа§Ъ а§Єа§Ва§∞а•За§Ца§£ а§Ца•Л.
Stepper а§Ха•З а§Ха•А а§Єа•Аа§Ѓа§Ња§Уа§В а§Ха•Л ৶а•Ва§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§Єа§ђа§Єа•З а§Ѓа§єа§Ва§Ча•А а§Ха§Ња§∞а•За§В а§Ѓа•Ла§Яа§∞а•На§Є а§Ѓа•За§В ৮ড়а§∞а§В১а§∞ а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а•За§В, а§Ж৙а§Ха•З а§Єа•Ба§Эৌ৵ loops а§Фа§∞ а§ђа§Ња§єа§∞а•А а§Ѓа•Ла§Яа§∞ а§Єа•Н৕ড়১ড় а§Єа•За§Ва§Єа§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха•З ৪ৌ৕. а§Па§Х ৮а•Ма§Ха§∞ а§Ха•З ৪ৌ৕ а§Єа§В৴а•Л৲৮ а§Ха§ња§ѓа§Њ ৆а•Аа§Х а§єа•И а§Ха§њ а§єа§Ѓ а§Ѓа§ња§≤, а§≤а•За§Хড়৮ ৐ড়৮ৌ а§°а•На§∞а§Ња§З৵ড়а§Ва§Ч а§Єа§∞а•На§Ха§ња§Я ৙а•Ба§≤, а§Жа§Ѓ ১а•Ма§∞ ৙а§∞ а§За§Ва§Ь৮ а§Ьа§Ња§∞а•А а§єа•И а§Ха•З а§≤а§ња§П а§Ж৵৴а•На§ѓа§Х. ৙а•Ба§≤ а§°а•На§∞а§Ња§З৵а§∞ а§Ыа•Ла§Яа•З а§Зু৶ৌ৶а•А а§Ъড়৙ ৙а§∞ ৙৺а§≤а•З а§Єа•З а§Ѓа•Ма§Ьа•В৶ а§єа•И ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ১а§В১а•На§∞ а§Й৮а•На§єа•За§В а§Ьа•Ла§°а§Љ ৶а•За§Ча§Њ, а§Єа•За§Ва§Єа§∞ а§Ха•З ৪ৌ৕ (а§С৙а•На§Яа§ња§Ха§≤ а§ѓа§Њ а§Ъа•Ба§Ва§ђа§Ха•Аа§ѓ) а§Фа§∞ а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞. а§Єа§ђа§Єа•З а§Х৆ড়৮ а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В, ৙а•Аа§Єа•А а§Єа•Йа§Ђа•На§Я৵а•За§ѓа§∞ а§Ха•А ৴а§Ха•Н১ড় а§Ха•З а§≤а§ња§П ৲৮а•Нৃ৵ৌ৶, а§Ж৙ а§≠а•А а§Ьа•Ла§°а§Љ а§Єа§Х১а•З а§єа•Иа§В а§Па§Х PID а§Па§≤а•На§Ча•Ла§∞ড়৕а•На§Ѓ.
а§Па§Х а§Єа§Ња§Іа§Ња§∞а§£ ৙а§∞ড়৵а§∞а•Н১৮ а§Ха•З ৪ৌ৕ а§Єа§∞а•Н৵а•Л ৐৮ৌа§Па§Ва§Ча•З multiturn а§Ѓа•За§В а§Ха§Ња§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙а§∞ড়৵а§∞а•Н১ড়১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В. а§Еа§Єа§В৴а•Л৲ড়১ ৮а•Ма§Ха§∞ а§Ѓа•За§В, crankshaft а§Ха•А а§Єа•Н৕ড়১ড় ৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞১ৌ а§єа•И. ৐৶а§≤৮а•З а§Ха•З ৐ৌ৶, а§Єа§ња§Ча•Н৮а§≤ а§Єа•Н৙а•Аа§° а§Фа§∞ а§Яа•Ла§Ха§Љ ৮ড়ৃа§В১а•На§∞а§£, ৶а•Л а§Ѓа•За§В а§∞а•Ла§Яа•З৴৮ а§Ѓа•За§В.
а§ѓа§єа§Ња§Б а§єа•И а§Ха•Иа§Єа•З а§Ж৙ ৮а•Ма§Ха§∞ а§Єа•З multiturn ৙а•На§∞ৌ৙а•Н১, Servo_16 а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§Ха•Й৮а•На§Ђа§Ља§ња§Ча§∞ а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ а§Па§Х ৙ড়৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Х৮а•За§Ха•На§Я а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ.
| а§Єа§ња§Ча•Н৮а§≤ | ৴а§Ха•Н১ড় а§Фа§∞ а§Ч১ড় |
| 1000 | а§Еа§Іа§ња§Х১ু ৴а§Ха•Н১ড় а§Фа§∞ а§Еа§Іа§ња§Х১ু а§Ч১ড় а§Ха•А ৵ড়৙а§∞а•А১ ৶ড়৴ৌ а§Ѓа•За§В |
| 750 | а§Жа§Іа•А ১ৌа§Х১ а§Фа§∞ а§Ч১ড় а§Ха•А ৵ড়৙а§∞а•А১ ৶ড়৴ৌ а§Ѓа•За§В |
| 600 | ৮а•На§ѓа•В৮১ু а§ђа§≤ а§Фа§∞ а§Ч১ড় а§Ха•А ৵ড়৙а§∞а•А১ ৶ড়৴ৌ а§Ѓа•За§В |
| 500 | ৮а•Ма§Ха§∞ а§Еа§≠а•А а§≠а•А а§Ца§°а§Ља§Њ а§єа•И |
| 400 | ৮а•На§ѓа•В৮১ু а§ђа§≤ а§Фа§∞ а§Ч১ড় ৵ৌুৌ৵а§∞а•Н১ |
| 250 | а§Жа§Іа•А ৴а§Ха•Н১ড় а§Фа§∞ ৵ৌুৌ৵а§∞а•Н১ а§Ч১ড় |
| 0 | а§Еа§Іа§ња§Х১ু ৴а§Ха•Н১ড় а§Фа§∞ а§Еа§Іа§ња§Х১ু а§Ч১ড় ৵ৌুৌ৵а§∞а•Н১ |
а§Єа§≠а•А servos а§ђа§єа•Б ৶а•Ма§∞ а§Ха§Ња§∞а•На§∞৵ৌа§И а§Ха•З а§≤а§ња§П а§Єа§В৙ৌ৶৮ а§ѓа•Ла§Ча•На§ѓ а§єа•Иа§В, а§≤а•За§Хড়৮ а§єа§Ѓ а§Ха•З৵а§≤ HXT900 а§Ха•З а§≤а§ња§П ৙а•Иа§Яа§∞а•Н৮ ১а•Иа§ѓа§Ња§∞ а§Ха§ња§ѓа§Њ а§єа•И. а§З৮ а§Єа§∞а•Н৵а•Л а§єа•И а§Ха§И ীৌৃ৶а•З, а§Ха§Ѓ а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ц৙১, USB ৶а•Н৵ৌа§∞а§Њ а§Єа§Ва§Ъа§Ња§≤ড়১ а§єа•Л а§Єа§Х১ৌ а§єа•И а§Фа§∞ а§Ха•З৵а§≤ ৶а•Л а§ѓа•Ва§∞а•Л а§Ха•А а§≤а§Ња§Ч১ а§Єа•З HobbyKing: HobbyKing.com _ HXT900 (а§Ьа§ђ а§Ж৙ а§Ж৶а•З৴ а§Єа•З HobbyKing а§Ха•З а§Ха•Ба§Ы ৥а•За§∞ ৙а•На§∞ৌ৙а•Н১ а§Ха§∞а•Ва§Б 10 а§Па§Ха•На§Єа§Яа•За§В৴৮ а§ђа§ња§Ха•На§∞а•Аа§Єа•В১а•На§∞: а§Єа•З 30 а§Єа•За§Ѓа•А а§Фа§∞ а§Єа•З 60 а§Єа•За§Ѓа•А)
а§Єа§∞а•Н৵а•Л HXT900 ৪ৌ৕ а§∞а•Ла§Яа•З৴৮ а§Ха•А а§Ч১ড় а§Єа§Ѓа§Ња§ѓа•Ла§Ьа•На§ѓ а§єа•И, а§Єа•З а§Ха•Ба§Ы а§∞а§Ња§Йа§Ва§° ৙а•На§∞১ড় ুড়৮а§Я а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В 80 а§Жа§∞৙а•Аа§Па§Ѓ, а§Фа§∞ а§Яа•Ла§Ха§Љ а§Па§Х ৮а•На§ѓа•В৮১ু а§Єа•З а§Єа§Ѓа§Ња§ѓа•Ла§Ьа•На§ѓ а§єа•И (а§Ьа•Иа§Єа•З а§єа•А а§Ж৙ а§Па§Х а§Ыа•Ла§Яа§Њ а§Єа§Њ ৙а•На§∞а§ѓа§Ња§Є а§Ха§∞৮ৌ а§ђа§В৶ а§Ха§∞ ৶а•З১ৌ а§єа•И) а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П 1.6 а§Ха§ња§≤а•Ла§Ча•На§∞а§Ња§Ѓ / (а§Ж৙ ৙ড়৮ ৮৺а•Аа§В а§∞а•Ла§Х а§Єа§Х১ৌ, а§ѓа§є а§Е৙৮а•А а§Йа§Ва§Ча§≤а§ња§ѓа•Ла§В а§Ха•З ৪ৌ৕ а§Ха§Є).
৴а§Ха•Н১ড় а§Фа§∞ а§Ч১ড় а§єа•И а§Ха§њ а§Па§Х HXT900 а§Єа•З ৙а•На§∞ৌ৙а•Н১ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ ৮ড়ুа•Н৮ ১ৌа§≤а§ња§Ха§Њ а§Єа•З ৙১ৌ а§Ъа§≤১ৌ а§єа•И, а§≤а§°а§Ља•А ৙ড়а§∞а•Ла§ѓа§Њ а§Ыа§°а§Љ а§ѓа§Њ pulleys а§Ха•З ৪ৌ৕ а§Па§Х а§∞а•Иа§Ца§ња§Х а§Жа§В৶а•Ла§≤৮ а§Ѓа•За§В а§∞а•Ла§Яа•З৴৮ ৐৶а§≤৮а•З.
| ৵ড়৲ড় |
а§Ѓа§ња§Ѓа•А ৙а•На§∞১ড় а§Ха•На§∞а§Ња§В১ড় |
а§Ч১ড় а§Еа§Іа§ња§Х১ু (а§Па§Ѓ а§Па§Ѓ/ুড়৮а§Я) |
৴а§Ха•Н১ড় а§Еа§Іа§ња§Х১ু (а§Ха§ња§≤а•Л) |
| а§≤а§°а§Ља•А ৙ড়а§∞а•Ла§ѓа§Њ ৙а§Яа•На§Яа•А 1 mm/Rev | 1 | 80 | 60 |
| а§≤а§°а§Ља•А ৙ড়а§∞а•Ла§ѓа§Њ ৙а§Яа•На§Яа•А 2 mm/Rev | 2 | 160 | 30 |
| а§≤а§°а§Ља•А ৙ড়а§∞а•Ла§ѓа§Њ ৙а§Яа•На§Яа•А 4 mm/Rev | 4 | 240 | 15 |
| а§Ъа§∞а§Ца•А ৵а•На§ѓа§Ња§Є 3.2 а§Ѓа§ња§Ѓа•А | 10 | 800 | 6 |
| а§Ъа§∞а§Ца•А ৵а•На§ѓа§Ња§Є 5 а§Ѓа§ња§Ѓа•А | 15 | 1200 | 4 |
| а§Ъа§∞а§Ца•А ৵а•На§ѓа§Ња§Є 10 а§Ѓа§ња§Ѓа•А | 30 | 2400 | 2 |
| а§Ъа§∞а§Ца•А ৵а•На§ѓа§Ња§Є 20 а§Ѓа§ња§Ѓа•А | 60 | 4800 | 1 |
HXT900 а§Ха•А ৵ড়৴а•Зৣ১ৌа§Уа§В а§Ха§Њ а§Єа§Ва§Ха•З১ 1.6 а§Ха§ња§≤а•Ла§Ча•На§∞а§Ња§Ѓ /. ১৐ а§Па§Х HXT900, а§Ъа§∞а§Ца•А 20 а§Ѓа§ња§Ѓа•А ৵а•На§ѓа§Ња§Є а§Ѓа•За§В, а§Й৆ৌ а§Єа§Х১ৌ 1.6 а§Ха§ња§≤а•Л. а§За§Є ১ৌа§≤а§ња§Ха§Њ а§Ѓа•За§В, а§Єа•Ба§∞а§Ха•Нৣড়১ ৙а§Ха•На§Ј ৙а§∞ а§єа•Л৮ৌ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§єа§Ѓ а§Ча§£а§®а§Њ 1 а§Ха§ња§≤а•Л.
а§Па§Х а§Єа§∞а•Н৵а•Л HXT900 а§Єа§В৴а•Л৲ড়১ а§Ха§∞а•За§В


৶а•Л৮а•Ла§В ৙а§Ха•На§Ја•Ла§В ৙а§∞ а§Ъড়৙а§Х৮а•З ৵ৌа§≤а§Њ а§≤а•За§ђа§≤ ৮ড়а§Ха§Ња§≤а•За§В, а§Ъа§Ња§∞ screws а§Ца•Ла§≤ ৶а•З৮ৌ, а§Зু৶ৌ৶а•А а§Ца•Ла§≤৮а•З а§Фа§∞ ১а•А৮ а§≤а§Ња§≤ ১ৌа§∞а•Ла§В а§Ѓа•За§В а§Ха§Яа•М১а•А, а§Єа§∞а•На§Ха§ња§Я а§ђа•Ла§∞а•На§° а§Ха•Л а§ђа§В৶ а§Ха§∞а•За§В.


а§За§Ва§Ь৮ а§ђа•Ла§≤а•На§Я а§Ца•Аа§Ва§Ъ, а§За§Єа§Ха§Њ а§Ѓа•Ба§Ца•На§ѓа§Ња§≤а§ѓ а§Єа•З ১৮ৌ৵ ৮ৌ৙৮а•З а§Ха§Њ а§ѓа§В১а•На§∞ parading. ৲ৌ১а•Б а§Ха§Яа•М১а•А а§Ха•З ৪ৌ৕ а§Х১а§∞৮а•А а§Яа•Иа§ђа•На§Є, а§Ьа§єа§Ња§В soldered а§єа•Иа§В ১ৌа§∞а•Ла§В.


৶а•Л а§Ча§ња§ѓа§∞ ৴ৌীа•На§Я а§Єа•З ৮ড়а§Ха§Ња§≤а•За§В, а§Фа§∞ а§Єа§≠а•А а§Жа§В১а§∞а§ња§Х ৙ৌа§∞а•На§Яа•На§Є а§Х১а§∞৮а•А а§Ха•З ৪ৌ৕ ৶а•Ва§∞ а§Ха§∞১а•З а§єа•Иа§В, а§Ха§њ а§∞а•Ла§Яа•З৴৮ а§Ха•Л а§∞а•Ла§Х৮а•З. а§Ьа§Ња§Ба§Ъа•За§В а§Ха§њ ৴ৌীа•На§Я а§Єа•Н৵১а§В১а•На§∞ а§∞а•В৙ а§Єа•З ৐৶а§≤ а§Ьৌ১ৌ а§єа•И.


а§Ха§Ља•Иа§Ва§Ъа•А ৶а•Л ৶ৌа§В১ а§ђа§°а§Ља•З chainring ৙а§∞ а§Эа•В৆ а§ђа•Ла§≤ а§Ха•З ৪ৌ৕ а§Ха§Яа•М১а•А.
৕а•На§∞а•За§° а§Ѓа•За§В а§Ьа§Ча§є а§∞а§Ња§Йа§Ва§°а§Еа§ђа§Ња§Йа§Я ১৮ৌ৵ ৮ৌ৙৮а•З а§Ха§Њ а§ѓа§В১а•На§∞. а§Ча§ња§ѓа§∞ ৙а§∞ ৙ড়৮ ৙а§∞а•На§Ъа•А, а§Ыа•Ла§Яа•А а§Єа•З ৴а•Ба§∞а•В. а§Єа§≠а•А а§Ча§ња§ѓа§∞а•На§Є а§Ха•З ৪ৌ৕ а§ђа§°а§Ља•А ৮а•Аа§Ъа•З а§Ьа§Ња§У, а§За§Ва§Ь৮ а§Ха•А а§Уа§∞. а§ђа§°а§Ља•А chainring, а§Ха§њ а§За§Ва§Ь৮ а§ђа•Ла§≤а•На§Я а§≤ৌ১ৌ а§єа•И, а§≠а•А ৶৐ৌৃৌ ৮৺а•Аа§В а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П, а§≤а•За§Хড়৮ а§Ха•З৵а§≤ ৶а•Ва§Єа§∞а•З а§Ча§ња§ѓа§∞ а§Ха•З а§≤а§ња§П а§Ха§∞а•Аа§ђ ৙а•На§∞ৌ৙а•Н১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П, а§Й৮а•На§єа•За§В ৐ড়৮ৌ а§Ыа•Ба§П.


а§ђа§Ња§Иа§В а§Уа§∞ а§Ы৵ড় а§єа•И а§Па§Х а§ѓа•Ла§Ь৮ৌ৐৶а•На§І а§Фа§∞ а§Ха§Ња§∞а•Нৃৌ১а•На§Ѓа§Х, ৶ৌа§Иа§В а§Уа§∞ а§Па§Х а§Єа§В৴а•Л৲৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Фа§∞ а§Ьа§єа§Ња§В ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В а§°а§Ња§≤ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§За§Ва§Чড়১ а§Ха§∞১ৌ а§єа•И.
৶а•Л а§ѓа§Њ ১а•А৮ а§Ыа•Ла§Яа•З SMD ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В а§Ьа•Ла§°а§Ља•За§В (0603), ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Ха•З а§∞а•В৙ а§Ѓа•За§В (а§Й৮а•На§єа•За§В ৵ড়৪а•Н১ৌа§∞ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ъড়১а•На§∞ ৙а§∞ а§Ха•На§≤а§ња§Х а§Ха§∞а•За§В)
৵৺ৌа§Б а§≠а•А а§єа•И а§Па§Х HXT 900 а§Ха§њ а§ѓа§єа§Ња§Б ৶ড়а§Ца§Ња§ѓа§Њ а§Єа•З а§Еа§≤а§Ч а§Єа§∞а•На§Ха§ња§Я а§Ха•З ৪ৌ৕. а§ѓа•Ла§Ь৮ৌа§Уа§В а§Фа§∞ а§Єа§≠а•А а§Ьৌ৮а§Ха§Ња§∞а•А а§єа§Ѓа•За§В а§Ѓа§ња§≤ а§Єа§Х১ৌ а§За§Є а§Ђа§Ља§Ња§За§≤ а§Ѓа•За§В ৵৺ৌа§Б а§∞а§єа•З а§єа•Иа§В. ৶а•Ба§∞а•На§≠а§Ња§Ча•На§ѓ а§Єа•З а§°а•За§Яа§Њ ৙১а•На§∞а§Х а§Ѓа•За§В а§Ъа•А৮а•А а§єа•И: uploads/files/HXT900_Type2.zip
а§Еа§В১ а§Ѓа•За§В а§За§Ва§Ь৮ а§Ха•Л а§ђа§В৶ а§Ха§∞а•За§В а§Фа§∞ а§ђа§Ња§єа§∞ а§Ха•А а§Ха•Л৴ড়৴ а§Ха§∞а•Л.
HXT900 а§Ха•З а§Еа§≤ৌ৵ৌ а§Е৮а•На§ѓ а§Зু৶ৌ৶а•А а§Єа§В৙ৌ৶ড়১ а§Ха§∞а•За§В
а§ѓа§є а§Ѓа•Ма§Ьа•В৶ৌ а§Зু৶ৌ৶а•А а§Ха•З а§Єа§≠а•А ৙а•На§∞а§Ха§Ња§∞ а§Ха•З а§≤а§ња§П ৮ড়а§∞а•Н৶а•З৴ ৙а•На§∞৶ৌ৮ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Еа§Єа§Ва§≠৵ а§єа•И. а§За§Є а§Ђа§Ља§Ња§За§≤ а§Ѓа•За§В а§Єа§≠а•А а§Ьৌ৮а§Ха§Ња§∞а•А а§єа•Иа§В, а§Єа•На§Ха•Аа§Ѓа§Њ а§Фа§∞ а§°а•За§Яа§Њ ৙১а•На§∞а§Х, а§єа§Ѓ а§Еа§ђ ১а§Х а§Па§Х১а•На§∞ а§Ха§ња§ѓа§Њ а§єа•И: uploads/files/ServoInfoAndDatasheets.zip
а§ђа§єа•Б ৶а•Ма§∞ а§µа§Ња§£а§ња§Ьа•На§ѓа§ња§Х ৶ৌ৪
а§Еа§В১ а§Ѓа•За§В, а§За§Є а§Єа§Ва§≠ৌ৵৮ৌ а§Ха•З ৮ড়а§∞а•Нুৌ১ৌа§Уа§В а§Ха•А а§Ца•Ла§Ь а§Ха•А а§єа•И. а§Єа•Ва§Ъа•А৙১а•На§∞ Pololu ৙৺а§≤а•З а§Єа•З а§Ѓа•Ма§Ьа•В৶ а§Ъа§Ња§∞ а§Ѓа•Йа§°а§≤, а§Єа•З а§Ха•Аু১а•Ла§В а§Ха•З ৪ৌ৕ 5 а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§ѓа•Ва§∞а•Л 15 а§ѓа•Ва§∞а•Л. ৮а•Аа§Ъа•З ৶ড়а§П а§Ча§П а§≤а§ња§Ва§Х а§Єа•З ৙১ৌ а§Ъа§≤১ৌ а§єа•И а§Ыа•Ла§Яа•А, а§≤а•За§Хড়৮ а§За§Є а§≤а§ња§Ва§Х а§Єа•З, а§Фа§∞ а§Єа§В৙а•Ва§∞а•На§£ а§Єа•Ва§Ъа•А৙১а•На§∞ Pololu а§Ха§Њ ৙১ৌ а§≤а§Чৌ৮а•З, а§Фа§∞ ৮ а§Ха•З৵а§≤ а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П:
http://www.pololu.com/product/2820
৪ৌুৌ৮а•На§ѓ а§Зু৶ৌ৶а•А а§Фа§∞ multiturn а§Ха•З а§Єа§Ва§Ъа§Ња§≤৮ а§Ха•З ৪ড়৶а•На§Іа§Ња§В১а•Ла§В
а§ѓа§В১а•На§∞৵১а•Н а§Фа§∞ ৵ড়৶а•На§ѓа•Б১ ৶ৌ৪ а§Ха•З ৙а•На§∞১а•На§ѓа•За§Х а§Ѓа•Йа§°а§≤ а§Еа§≤а§Ч а§єа•И, а§≤а•За§Хড়৮ а§Єа§≠а•А а§Єа§єа§Ња§ѓа§Х а§Ха•З а§≤а§ња§П а§Па§Х а§єа•А ৪ড়৶а•На§Іа§Ња§В১а•Ла§В а§єа•Иа§В: uploads/files/ServoCircuitsAndTimings.zip
ুৌ৮а§Х а§Єа§∞а•Н৵а•Л а§Ха•А а§Ха§Ња§∞а•На§∞৵ৌа§И.
- а§Єа•З а§Єа§ња§Ча•Н৮а§≤ 0.5 а§Ѓа•За§В 2.5 Ms, а§Зু৶ৌ৶а•А а§Ъড়৙ а§Ѓа•За§В а§Х৮৵а§∞а•На§Я а§Ха§ња§ѓа§Њ а§Ьৌ১ৌ а§єа•И, а§Ѓа•За§В а§Ха•Ла§И ুৌ৮ а§Єа•З ৙а§∞а•Н৵১ুৌа§≤а§Њ 0 ১а•А৮ ৵а•Ла§≤а•На§Я ৙а§∞.
- а§Зু৶ৌ৶а•А а§Еа§В৶а§∞ а§Ыа•Ла§Яа•З ১৮ৌ৵ ৮ৌ৙৮а•З а§Ха§Њ а§ѓа§В১а•На§∞ (а§Ха•Иа§Єа•З а§ѓа§є а§Ха§∞ ৶ড়ৃৌ а§єа•И ৙а§∞ ৮ড়а§∞а•На§≠а§∞ а§Ха§∞১а•З а§єа•Ба§П), а§ѓа§є а§≠а•А а§Йа§Єа•З а§Єа•З а§Па§Х ুৌ৮ ৙а•На§∞৶ৌ৮ а§Ха§∞১ৌ а§єа•И 0 а§Ѓа•За§В 3 ৵а•Ла§≤а•На§Я .
- ৃ৶ড় ৶а•Л voltages а§ђа§∞а§Ња§ђа§∞ а§єа•Иа§В, а§Ъড়৙ ৵а•Ла§≤а•На§Я а§За§Ва§Ь৮ ৮৺а•Аа§В.
- ৶а•Л voltages а§Ха•З а§∞а•В৙ а§Ѓа•За§В, а§Па§Х-৶а•Ва§Єа§∞а•З а§Єа•З ৵ড়а§Ъа§≤ড়১, а§Ѓа•Ла§Яа§∞ а§Ха•З а§≤а§ња§П а§Еа§Іа§ња§Х а§Єа•З а§Еа§Іа§ња§Х ৴а§Ха•Н১ড় ৶а•Н৵ৌа§∞а§Њ а§Ъড়৙.
- а§Ѓа•Ла§Яа§∞ а§Ха•З а§≤а§ња§П ৵а•Ла§≤а•На§Яа•За§Ь а§Па§Х ১а§∞а§є а§Єа•З ৶а•А а§Ьৌ১а•А а§єа•И, а§ѓа§Њ ৵ড়৙а§∞а•А১ ৶ড়৴ৌ а§Ѓа•За§В, ৙а§∞ ৮ড়а§∞а•На§≠а§∞ а§Ха§∞১ৌ а§єа•И а§Ха§њ а§Ха•На§ѓа§Њ а§Йа§Ъа•На§Ъ ৵а•Ла§≤а•На§Яа•За§Ь а§ѓа§Њ а§Е৮а•На§ѓ.
а§Єа§єа§Ња§ѓа§Х а§Ха•З а§ђа§єа•Б ৶а•Ма§∞ а§Ха§Ња§∞а•На§∞৵ৌа§И.
- ১৮ৌ৵ ৮ৌ৙৮а•З а§Ха§Њ а§ѓа§В১а•На§∞ а§Ха•З ৪ৌ৕ ৶а•Л ৮ড়৴а•На§Ъড়১ ৙а•На§∞১ড়а§∞а•Ла§Іа•Ла§В а§Ха•Л ৐৶а§≤а§Њ а§Ча§ѓа§Њ а§єа•И, а§єа§Ѓа•З৴ৌ а§Е৙৮а•А ৶а•Ма§°а§Љ а§Ха•З а§ђа•Аа§Ъ а§Ѓа•За§В ১৮ৌ৵ ৮ৌ৙৮а•З а§Ха§Њ а§ѓа§В১а•На§∞ а§Е৮а•Ба§Ха§∞а§£.
- а§Єа§ђ а§Ха•Ба§Ы а§ђа§ња§≤а•На§Ха•Ба§≤ ৪ৌুৌ৮а•На§ѓ а§Єа§∞а•Н৵а•Л а§Ѓа•За§В а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§єа•И.
- ৃ৶ড় а§Ж৶а•З৴ а§Ха•З а§Єа§ња§Ча•Н৮а§≤ а§Жа§Іа§Њ а§єа•И (1.5 Ms), а§Йа§Єа§Ха•З ৐ৌ৶ ৶а•Л voltages а§ђа§∞а§Ња§ђа§∞ а§єа•Иа§В а§Фа§∞ а§Ъড়৙ а§Ѓа•Ла§Яа§∞ а§Ха•З а§≤а§ња§П а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ж৙а•Ва§∞а•Н১ড় ৮৺а•Аа§В а§Ха§∞১ৌ а§єа•И.
- ৶а•Л voltages а§Ха•З а§∞а•В৙ а§Ѓа•За§В, а§Па§Х-৶а•Ва§Єа§∞а•З а§Єа•З ৵ড়а§Ъа§≤ড়১, а§Ѓа•Ла§Яа§∞ а§Ха•З а§≤а§ња§П а§Еа§Іа§ња§Х а§Єа•З а§Еа§Іа§ња§Х ৴а§Ха•Н১ড় ৶а•Н৵ৌа§∞а§Њ а§Ъড়৙, а§Па§Х а§єа•А а§∞а§Ња§Єа•Н১ৌ а§ѓа§Њ а§Е৮а•На§ѓ.
а§Хড়১৮ৌ ৙ৌ৵а§∞ а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П а§≠а•За§Ьа§Њ?
- ৮а•Ма§Ха§∞ а§Еа§В৶а§∞ а§Ъড়৙ а§Па§Х "৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§Ша§Яа§Х" а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§Ха§Ња§∞а•На§ѓ а§Ха§∞১ৌ а§єа•И.
- "৪ৌুৌ৮а•На§ѓ" а§ѓа§Њ "৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ" а§Ха•З а§≤а§ња§П а§ђа§В৶ а§≤а•В৙ а§Єа§∞а•Н৵а•Л а§Ѓа•За§В ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§єа•Л১а•А а§єа•И.
- а§ђа§єа•Б ৶а•Ма§∞ ৶ৌ৪ а§Ѓа•За§В а§ѓа§є а§єа•И а§Па§Х а§Єа§∞а§≤ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§ѓа§Њ "৙а•Аа§Ыа•З ৙а•Аа§Ыа•З а§Ђа§ња§∞৮ৌ".
- ৶а•Л৮а•Ла§В а§єа•А а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В, ৵৺ৌа§Б а§єа•И а§Па§Х ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ৵а§Ха•На§∞.
- ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ৵а§Ха•На§∞, ৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ а§Ха•З а§Жа§Іа§Ња§∞ ৙а§∞ (৶а•Л voltages а§Ха•З а§ђа•Аа§Ъ ৵ড়а§Ъа§≤৮), а§Ѓа•Ла§Яа§∞ а§Ха•З а§≤а§ња§П ৵а•Ла§≤а•На§Яа•За§Ь ৮ড়а§∞а•На§Іа§Ња§∞ড়১ а§Ха§∞১ৌ а§єа•И.
- "S" а§Ха•А ১а§∞а§є а§Ха•За§В৶а•На§∞ а§Ѓа•За§В а§Па§Х а§Ђа•На§≤а•Иа§Я а§Ѓа•За§В а§Єа•Н৕ৌ৮ а§Ха•З ৪ৌ৕ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ৵а§Ха•На§∞ а§єа•И.
- ৵а§Ха•На§∞ а§Ха§Њ ৥а§≤ৌ৮ (৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§ђа§≤) а§Па§Х а§∞а•Ла§Х৮а•З৵ৌа§≤а§Њ ৶а•Н৵ৌа§∞а§Њ ৵ড়৮ড়ৃুড়১ а§єа•И.
- а§Ха•За§В৶а•На§∞ а§Ѓа•За§В ৪ু১а§≤ а§Ьа§Ча§є (а§Ѓа•Г১ а§Ха•На§Ја•З১а•На§∞) а§Па§Х ৶а•Ва§Єа§∞а§Њ а§∞а•Ла§Х৮а•З৵ৌа§≤а§Њ а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§єа•Л а§Ьৌ১ৌ а§єа•И, а§За§Єа§Ха•А а§Ъа•Ма§°а§Ља§Ња§И ৮ড়а§∞а•На§Іа§Ња§∞ড়১ а§Ха§∞১ৌ а§єа•И а§Ха§њ.
- а§Єа•И৶а•На§Іа§Ња§В১ড়а§Х а§∞а•В৙ а§Єа•З а§ѓа§є ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§Фа§∞ а§≤а§Ша•Б а§Ѓа•Г১ а§Ха•На§Ја•З১а•На§∞ а§Ха§Њ а§Па§Х а§ђа§єа•Б১ а§Ха•Ба§Ы а§єа•И а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§ђа•З৺১а§∞ а§єа•Ла§Ча§Њ, а§≤а•За§Хড়৮ а§Ж৙ ৐৥৊ৌ а§Ъ৥৊ৌ ৮৺а•Аа§В а§Ха§∞ а§Єа§Х১ৌ.
- ৃ৶ড় а§Ж৙ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ ৐৥৊ৌ а§Ъ৥৊ৌ, а§За§Ва§Ь৮ а§Еа§Іа§ња§Х а§Ђа§∞а•На§Ѓ а§єа•И, а§Фа§∞ а§ѓа§єа§Ња§В ১а§Х а§Ха§њ а§єа§ња§Ва§Єа§Х а§Єа•Н৵ড়а§Ва§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙а•На§∞ৌ৙а•Н১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В.

Brushless servomotors


а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З ৪ৌ৕ а§ѓа§Њ ৐ড়৮ৌ а§ђа•На§∞৴ а§Ха§∞ а§∞а§єа•З а§єа•Иа§В, а§Єа§≠а•А ৙а•На§∞а§Ха§Ња§∞ а§Ха•З, а§Єа•З а§Ха•Ба§Ы а§Ча•На§∞а§Ња§Ѓ ৵а§Ь৮ а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৴а•Ба§∞а•В 10 а§Ха§ња§≤а•Л৵ৌа§Я а§ђа§ња§Ьа§≤а•А
а§Єа•Ва§Ъа•А а§Ѓа•За§В а§єа•И: www.hobbyking.com а§Ж৙ ু৺ৌ৮ а§Ѓа•Ва§≤а•На§ѓа•Ла§В а§Фа§∞ а§Й৮ а§Іа§Ња§∞а§Ња§Уа§В а§Ха•З ৪ৌ৕ а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৙ৌৃа§≤а§Я а§Ха•З а§≤а§ња§П ৮ড়ৃа§В১а•На§∞а§Х а§Ха•З ৪ৌ৕ а§Ѓа•Ла§Яа§∞а•На§Є ৙ৌ а§Єа§Х১а•З а§єа•Иа§В 300 ুৌ৮а§Х а§Єа§Ва§Ха•З১ ৙а•На§∞а§£а§Ња§≤а•А Theremino а§Ха•З ৪ৌ৕ amps.
৙а•На§∞১а•На§ѓа•За§Х а§Ха•З ৪ৌ৕ “৶ৌ৪” а§Ха§Њ ৙а•На§∞а§Ха§Ња§∞ “৮а•Ма§Ха§∞” а§Ж৙ ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৶৪ а§Єа•Н৵১а§В১а•На§∞ а§Ѓа•Ла§Яа§∞а•На§Є.
а§Ъড়১а•На§∞ ৶ড়а§Цৌ৮а•З а§Ха•З а§Па§Х 6 а§Ха§ња§≤а•Л৵ৌа§Я (125 а§Па§Ѓа•Н৙а•Аа§ѓа§∞ а§Ѓа•За§В 48 ৵а•Ла§≤а•На§Я) а§Фа§∞ а§Па§Х а§Ыа•Ла§Яа•З ৮ড়ৃа§В১а•На§∞а§Х brushless а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З а§≤а§ња§П.
а§Ха•Ба§Ы а§Ъৃ৮ড়১ а§За§Ва§Ь৮ а§Ха•З а§Єа§ђа§Єа•З ৶ড়а§≤а§Ъа§Єа•Н৙ а§Й৶ৌ৺а§∞а§£
HobbyKing а§Ха•Иа§Яа§≤а•Йа§Ч ৐৶а§≤ а§Ча§ѓа§Њ а§єа•И. ৺ু৮а•З а§Ъа•Б৮ৌ ৕ৌ а§За§Ва§Ь৮ а§≤а§ња§Ва§Х ৐৶а§≤ ৶ড়ৃৌ а§єа•И а§Фа§∞ а§ѓа§є а§єа§Ѓа§Ња§∞а•З а§≤а§ња§П а§Па§Х а§Єа§Ѓа§Єа•На§ѓа§Њ а§єа•И а§Ха•На§ѓа•Ла§Ва§Ха§њ а§єа§Ѓ ৶а§Вৰড়১ ৃ৶ড় а§єа§Ѓ а§Яа•Ва§Яа•А а§єа•Ба§И-а§≤а§ња§Ва§Х ৮а•Ма§Ха§∞а•А а§Ъৌ৺৮а•З ৵ৌа§≤а•Ла§В а§Ха•Л ৙а•На§∞а§Хৌ৴ড়১.
а§За§Єа§Ха•З а§Еа§≤ৌ৵ৌ HobbyKing а§Ха•Иа§Яа§≤а•Йа§Ч а§Ха•Л ৶а•За§Ц৮а•З а§Ха•З а§≤а§ња§П а§Х৆ড়৮ а§єа•Л а§Ча§ѓа§Њ а§єа•И, а§Ха•На§ѓа•Ла§В а§Ѓа•Иа§В а§За§Ва§Ь৮ ৙ৌ৵а§∞ а§Ха•З а§≤а§ња§П а§Ж৶а•З৴ ৮৺а•Аа§В а§Ха§∞ а§Єа§Х১а•З. а§Ѓа•Ла§Яа§∞а•На§Є а§Ьа§≤а•Н৶ а§Ха•З ৙а•На§∞৕ু ৙а•Га§Ја•Н৆ а§ђа§Ња§єа§∞ а§ђа§ња§В৶а•Б а§єа•И, ১а•Л а§Єа§ђа§Єа•З а§Еа§Ъа•На§Ыа§Њ а§єа§Ѓ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В, а§Жа§Ха§Ња§∞ ৶а•Н৵ৌа§∞а§Њ а§Єа•Йа§∞а•На§Я а§Ха§ња§ѓа§Њ а§Ча§ѓа§Њ:
https://hobbyking.com/en_us/electric-motors-1/size.html
а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П ৮ড়ৃа§В১а•На§∞а§Ха•Ла§В а§Ха•З а§Й৶ৌ৺а§∞а§£
৮ড়ৃа§В১а•На§∞а§Х а§Єа•З 6 а§Па§Пু৙а•А. brushless а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З а§≤а§ња§П (BRUSHLESS) – а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В 6 а§ѓа•Ва§∞а•Лhttp://www.hobbyking.com/hobbyking/store/__4318__TURNIGY_Plush_6A_8bec_6g_Speed_Controller.html
৮ড়ৃа§В১а•На§∞а§Х а§Єа•З 25 а§Па§Пু৙а•А. brushless а§Ѓа•Ла§Яа§∞а•На§Є а§Ха•З а§≤а§ња§П (BRUSHLESS) – а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В 8 а§ѓа•Ва§∞а•Л
http://www.hobbyking.com/hobbyking/store/__11616__Turnigy_AE_25A_Brushless_ESC.html
৮ড়ৃа§В১а•На§∞а§Х а§Єа•З 20 Amps а§Ха•З ৪ৌ৕ а§ђа•На§∞৴ а§Ѓа•Ла§Яа§∞а•На§Є (а§ђа•На§∞৴) – а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В 3 а§ѓа•Ва§∞а•Л
http://www.hobbyking.com/hobbyking/store/__9090__Turnigy_20A_BRUSHED_ESC.html
৮ড়ৃа§В১а•На§∞а§Х а§Єа•З 30 Amps а§Ха•З ৪ৌ৕ а§ђа•На§∞৴ а§Ѓа•Ла§Яа§∞а•На§Є (а§ђа•На§∞৴) – а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В 6 а§ѓа•Ва§∞а•Л
http://www.hobbyking.com/hobbyking/store/__6468__Turnigy_30A_BRUSHED_ESC.html
Pololu а§Єа•Ва§Ъа•А৙১а•На§∞ а§Ѓа•За§В а§Ѓа•Ла§Яа§∞а•На§Є
а§ѓа§є а§За§Є а§≤а§ња§Ва§Х а§Ха•З ৪ৌ৕ ৙а•На§∞а§Ња§∞а§Ва§≠ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Е৮а•Б৴а§В৪ড়১ а§єа•И, а§Фа§∞ а§Єа§В৙а•Ва§∞а•На§£ а§Єа•Ва§Ъа•А৙১а•На§∞ Pololu а§Ха§Њ ৙১ৌ а§≤а§Чৌ৮а•З, а§Фа§∞ ৮ а§Ха•З৵а§≤ а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П. Pololu а§Єа•З а§Єа§ђ а§Ха•Ба§Ы DIY а§Ха•З а§≤а§ња§П.
http://www.pololu.com/category/22/motors-and-gearboxes
Solarbotics а§Єа•Ва§Ъа•А৙১а•На§∞ а§Ѓа•За§В а§Ѓа•Ла§Яа§∞а•На§Є
а§≠а•А а§ѓа§єа§Њ а§Ѓа•Ла§Яа§∞а•На§Є (а§Фа§∞ а§Е৮а•На§ѓ а§Й৙ৃа•Ла§Ча•А а§Ша§Яа§Х ৮ড়а§∞а•Нুৌ১ৌа§Уа§В а§Ха•З а§≤а§ња§П). а§≤а§Ња§Ч১ а§Еа§Іа§ња§Х, а§≤а•За§Хড়৮ а§ѓа§є а§єа§∞ а§Еа§ђ а§Фа§∞ а§Ђа§ња§∞ а§Па§Х ৶а•За§Ца•Л а§≤а§Ња§ѓа§Х а§єа•И, а§За§Є а§Ха•Иа§Яа§≤а•Йа§Ч а§Ѓа•За§В а§≠а•А:
https://solarbotics.com/product/gm2/
https://solarbotics.com/catalog/motors-servos/gear-motors/
а§Іа•Нৃৌ৮: ৵а•Нৃৌ৵৪ৌৃড়а§Х а§Ђа§∞а•На§Ѓа•Ла§В а§Ха•З а§≤а§ња§П а§≤а§ња§Ва§Х а§Па§Х а§Ыড়৙а•З а§єа•Ба§П ৵ড়а§Ьа•На§Юৌ৙৮ а§Єа•Ба§Эৌ৵ а§єа•И а§Ха§њ а§єа•Л а§Єа§Х১ৌ а§єа•И, а§Йа§Є а§Ха•З а§≤а§ња§П а§Ж৙ а§ѓа§є ৮ড়а§∞а•Н৶ড়ৣа•На§Я а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§П: а§Ха•Ла§И а§≠а•А а§≠а•Ба§Ч১ৌ৮ а§Ха§ња§ѓа§Њ а§Ьৌ১ৌ а§єа•И а§Фа§∞ а§єа§Ѓ а§ѓа§єа§Ња§Б а§Єа•Ва§Ъа•А৐৶а•На§І а§Ха§В৙৮ড়ৃа•Ла§В а§Ѓа•За§В а§Єа•З а§Ха§ња§Єа•А а§Ха•З ৪ৌ৕ а§Па§Х а§Па§Ха§≤ а§Иа§Ѓа•За§≤ а§Ха§Њ а§Ж৶ৌ৮-৙а•На§∞৶ৌ৮ а§Ха§≠а•А ৮৺а•Аа§В. ১а•Л а§єа§Ѓ а§Еа§Ъа•На§Ыа§Ња§И а§Фа§∞ а§ђа•Ба§∞а§Ња§И а§Єа•З а§Ха§ња§Єа•А а§Ха•Л а§≠а•А а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В ৐ৌ১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Єа•Н৵১а§В১а•На§∞ а§єа•Иа§В а§Фа§∞ а§єа§Ѓа§Ња§∞а•А “а§Ца§∞а•А৶ৌа§∞а•А а§ѓа•Ба§Ха•Н১ড়ৃৌа§Б”, ৵а•З а§Єа§ња§∞а•На§Ђ а§Й৙ৃа•Ла§Ча•А а§Ьৌ৮а§Ха§Ња§∞а•А а§єа•Иа§В, а§Ша§Яа§Ха•Ла§В а§Ха•З а§єа§Ѓа§Ња§∞а•З ৴а•Ла§І а§Ха•З ৶а•Ма§∞ৌ৮ ৙а•На§∞ৌ৙а•Н১.
ServoPID
а§За§Є а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§Па§Х а§Па§Ъ ৙а•Ба§≤ а§Ьа•Л а§°а•Аа§Єа•А а§Ѓа•Ла§Яа§∞ ৙а§Ъа§Ња§Є ৵ৌа§Я а§Е৙ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В а§єа•И (а§Ха•Ба§Ы amps а§Фа§∞ ১а•Аа§Є а§Єа•З а§Еа§Іа§ња§Х ৵а•Ла§≤а•На§Я ১а§Х) а§Фа§∞ а§Й৮а•На§єа•За§В а§Зু৶ৌ৶а•А а§Ѓа•Ла§Яа§∞а•На§Є а§Ѓа•За§В ৐৶а§≤ а§Ьৌ১а•З а§єа•Иа§В.
а§єа§Ѓ ৮ড়а§∞а•Нুৌ১ৌ а§Фа§∞ eBay MaxTheremino а§Ха•З ৵ড়а§Ха•На§∞а•З১ৌ ৲৮а•Нৃ৵ৌ৶, а§Ж৪ৌ৮а•А а§Єа•З а§За§Є ৙а§∞а§ња§ѓа•Ла§Ь৮ৌ а§Ха•З а§≤а§ња§П а§Ѓа•Б৶а•На§∞ড়১ а§Єа§∞а•На§Ха§ња§Я а§ђа•Ла§∞а•На§°а•Ла§В а§Фа§∞ а§Ха§ња§Я ১а•Иа§ѓа§Ња§∞ а§Ха•А а§єа•И а§Ьа•Л. а§Ха§Њ ৙ৌа§≤৮ а§Ха§∞а•За§В а§Иа§ђа•З ৙а§∞ MaxTheremino а§≤а§ња§Ва§Х а§Ха•А а§Фа§∞ ৃ৶ড় ৵৺ а§Й৮а•На§єа•За§В ৕ৌ а§Еа§≠а•А а§≠а•А а§Йа§Єа§Ха•З а§≤а§ња§П а§Й৮а•На§єа•За§В а§≠а•За§Ьа•З а§Ьৌ৮а•З а§Ха•З а§≤а§ња§П а§Єа•Ва§Ъа•А а§≤а§ња§Ц৮ৌ.
а§Ьа•Л а§≤а•Ла§Ч ৙৪а§В৶ а§Ха§∞১а•З а§єа•Иа§В а§Ха•З৵а§≤ а§Ша§Яа§Ха•Ла§В а§Ца§∞а•А৶ а§Єа§Х১а•З а§єа•Иа§В а§Фа§∞ ৙а•Аа§Єа•Аа§ђа•А ১а§Х৮а•Аа§Х а§Ѓа•Б৶а•На§∞ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П DIY, а§ѓа§є а§Єа§В৙а•Аৰড়১ а§Ђа§Ља§Ња§За§≤ а§Ѓа•За§В а§Єа•Н৕ড়১ а§єа•Ла§Ча§Њ а§Єа§≠а•А а§За§Є а§Ѓа•Йа§°а•На§ѓа•Ва§≤ ৐৮ৌ৮а•З а§Ха•А а§Ьа§∞а•Ва§∞১ а§Ђа§Ља§Ња§За§≤а•За§В.
а§Иа§Ча§≤ ৙а•На§∞а§Ња§∞а•В৙ а§Ѓа•За§В а§Єа§∞а•На§Ха§ња§Я а§ђа•Ла§∞а•На§°а•Ла§В, а§Ы৵ড়ৃৌа§Б, а§Єа§ња§Ѓа•Ба§≤а•З৴৮ LTSpice а§Фа§∞ а§ѓа•Ла§Ь৮ৌа§Па§В:
ServoPID_V1.zip
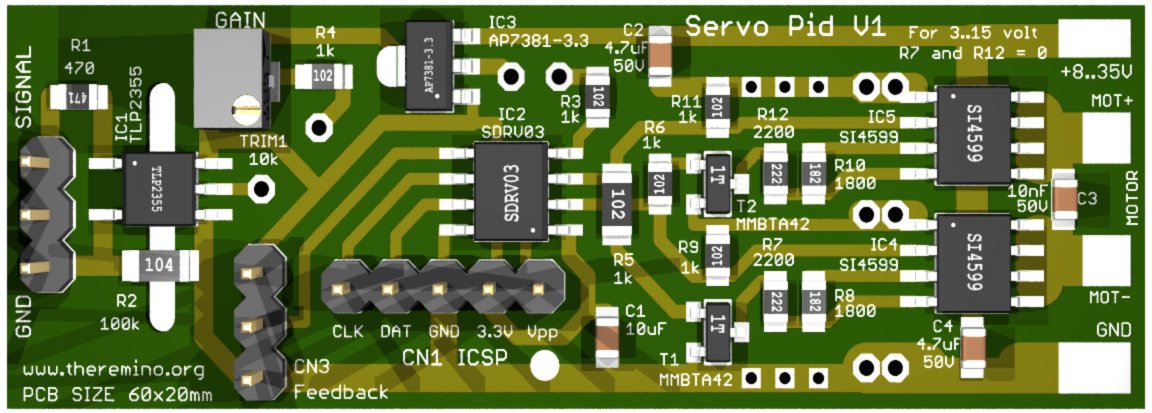
৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ а§Па§Х а§Ха•На§≤а§Ња§Єа§ња§Х а§Єа§Ва§Ха•З১ а§єа•Л а§Єа§Х১ৌ а§єа•И “৮а•Ма§Ха§∞” а§ѓа§Њ “PWM”, а§Ха§њ а§Па§Х а§Ѓа•Йа§°а•На§ѓа•Ва§≤ а§Єа•З а§Ж а§Єа§Х১ৌ а§єа•И а§Ѓа§Ња§Єа•На§Яа§∞, а§Па§Х а§Ха•З ৐ৌ৶ IotModule, а§Єа•З а§Па§Х Netmodule, а§ѓа§Њ а§ѓа§єа§Ња§Б ১а§Х а§Ха§њ а§Ѓа•Йа§°а§≤ ৺৵ৌа§И а§Ьа§єа§Ња§Ь а§Ха•З а§≤а§ња§П а§Па§Х а§∞а§ња§Ѓа•Ла§Я а§Ха§Ва§Яа•На§∞а•Ла§≤ а§Єа•З.
а§Па§Ъ ৙а•Ба§≤ а§Па§Х а§Ѓа§Ња§За§Ха•На§∞а•Л ৮ড়ৃа§В১а•На§∞а§Х ৙а•Аа§Жа§Иа§Єа•А ৶а•Н৵ৌа§∞а§Њ ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§ња§ѓа§Њ а§Ьৌ১ৌ, а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§єа•И а§Ха§њ а§єа§Ѓ ৵ড়а§≠ড়৮а•Н৮ а§Ж৵৴а•На§ѓа§Х১ৌа§Уа§В а§Ха•З а§≤а§ња§П ১а•Иа§ѓа§Ња§∞ а§Ха§ња§ѓа§Њ а§єа•И ৪ৌ৕ ৮ড়а§∞а•Н৶а•З৴ৃа•Ла§Ча•На§ѓ. а§Єа§ђа§Єа•З ৪ৌুৌ৮а•На§ѓ а§Єа•Н৕ড়১ড় а§Ѓа•За§В а§Ж৙ а§Па§Х а§Ѓа•Ла§Яа§∞ а§Жа§Ча•З а§ѓа§Њ ৙а•Аа§Ыа•З а§Ъа§≤ а§∞а§єа•З а§єа•Иа§В, а§Ч১ড় а§Ха§Њ а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮. а§Фа§∞ а§Еа§Іа§ња§Х ৵а•Нৃৌ৙а§Х а§Ѓа§Ња§Ѓа§≤а•Ла§В а§Ѓа•За§В а§Па§Х ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Єа•Н৕ড়১ড় а§Ха•Л ুৌ৙৮а•З а§Ха•З а§≤а§ња§П а§Фа§∞ а§Па§Х ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Па§≤а•На§Ча•Ла§∞ড়৕а•На§Ѓ а§Ха•З ৪ৌ৕ а§Єа•Н৕ড়১ড় а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১.
৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Фа§∞ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Ха•З ৪ৌ৕ а§ѓа§є а§Ха•На§≤а§Ња§Єа§ња§Ха•На§Є а§Ха•З а§Па§Х а§єа•А а§Ж৙а§∞а•З৴৮ а§єа•И “৮а•Ма§Ха§∞” а§≤а•За§Хড়৮, ৵ড়৙а§∞а•А১ а§µа§Ња§£а§ња§Ьа•На§ѓа§ња§Х ৮а•Ма§Ха§∞, а§Ж৙ ৙а•На§∞১а•На§ѓа•За§Х ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ а§≠ড়৮а•Н৮ а§Ха§∞৮а•З а§Ха•А а§Єа§Ва§≠ৌ৵৮ৌ а§єа•И, Morta а§Ха•На§Ја•З১а•На§∞, а§Па§°а•Аа§Єа•А а§Ха•А ুৌ৙ а§Єа§Ва§Ха§≤а•Н৙ а§Фа§∞ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Ча•Ба§£а§Ња§Ва§Х.
৵ড়৙а§∞а•А১ ৪ৌুৌ৮а•На§ѓ а§Зু৶ৌ৶а•А а§З৮৙а•Ба§Я а§Єа§Ва§Ха•З১ а§Па§Х а§С৙а•На§Яа•Л а§ѓа•Ба§Ча•На§Ѓа§Х а§Ха•З ৪ৌ৕ а§Еа§≤а§Ч а§єа•И. а§ѓа§є ৮ড়ৃа§В১а•На§∞а§£ ৙а•Аа§Єа•А а§Ха•А а§Ха§њ а§Єа•З ৙а•Ва§∞а•А ১а§∞а§є а§Єа•З а§∞а§Ц৮а•З а§Ха•З а§Ѓа•Ла§Яа§∞ а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ж৙а•Ва§∞а•Н১ড় а§Єа§∞а•На§Ха§ња§Я а§Ха•А а§ђа§°а§Ља•З ৙а•Иুৌ৮а•З ৙а§∞ а§Еа§≤а§Ч а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Е৮а•Бু১ড় ৶а•З১ৌ а§єа•И. а§ѓа§є а§Ѓа•Ма§≤а§ња§Х а§ђа§ња§Ьа§≤а•А а§Ха•З а§єа§Єа•Н১а§Ха•На§Ја•З৙ а§Ха§њ а§Ца§∞а§Ња§ђа•А а§Ха§Њ а§Ха§Ња§∞а§£ ৐৮ а§Єа§Х১ৌ ৪ুৌ৙а•Н১ а§Ха§∞а•За§Ва§Ча•З.
৵ৌৃа§∞а§ња§Ва§Ч
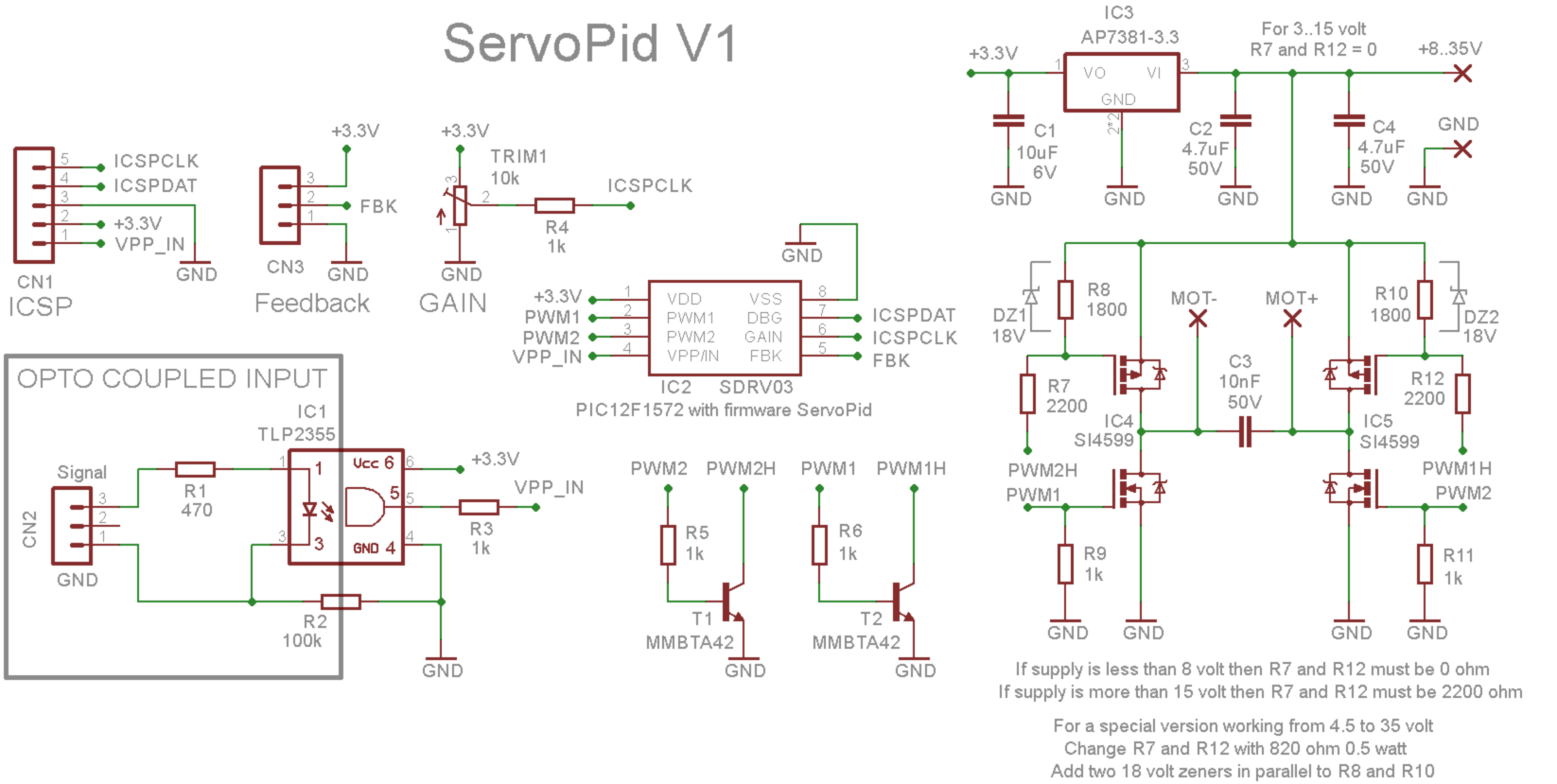
৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১, а§Єа§∞а•Н৵а•Л ৙а•На§∞а§Ха§Ња§∞ а§ѓа§Њ PWM, а§ѓа§є а§Х৮а•За§Ха•На§Яа§∞ CN2 а§Єа•З а§Ьа•Ба§°а§Ља§Њ а§єа•И, а§Жа§∞ 1 а§Ьа•Л а§Ха•Ба§Ы milliamperes а§Фа§∞ ৙ৌৃа§≤а§Я а§Ха•З а§≤а§ња§П а§Ђа•Ла§Яа•Л-а§ѓа•Ба§Ча•На§Ѓа§Х а§Ха•З а§Па§≤а§Иа§°а•А ৵а§∞а•Н১ুৌ৮ а§Єа•Аুড়১ а§Ха§∞১ৌ а§єа•И а§Ха•З а§Ѓа§Ња§Іа•На§ѓа§Ѓ а§Єа•З.
৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ а§Ха•З а§Жа§ѓа§Ња§Ѓ а§Єа•З а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П 3 а§Ѓа•За§В 6 ৵а•Ла§≤а•На§Я, а§Єа§Ха§Ња§∞ৌ১а•На§Ѓа§Х ৮ৌৰ৊а•А а§Єа§Ѓа§ѓ а§Ха•З а§ђа•Аа§Ъ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П 500 а§Ѓа•За§В 2500 а§єа§Ѓа•За§В (а§Ха•З а§ђа§Ња§∞а•З а§Ѓа•За§В), а§Фа§∞ а§Єа•З ৙а•Б৮а§∞ৌ৵а•Г১а•Н১ড় ৶а§∞ 50 а§єа§∞а•На§Яа•На§Ь 500 а§єа§∞а•На§Яа•На§Ь.
৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ ১৪а•Н৵а•Аа§∞-а§ѓа•Ба§Ча•На§Ѓа§Х IC1 а§Ха•З а§Ѓа§Ња§Іа•На§ѓа§Ѓ а§Єа•З а§Ьа§Ња§∞а•А а§єа•И, R3 а§Ха•З а§Ѓа§Ња§Іа•На§ѓа§Ѓ а§Єа•З а§Фа§∞ ৙ড়৮ а§Ха•З а§≤а§ња§П а§Ж১ৌ а§єа•И 4 а§Єа•Ва§Ха•На§Ја•На§Ѓ а§Ха•А, а§Ьа•Л а§Й৙ৌৃа•Ла§В а§Йа§Ъа•На§Ъ а§Єа§Ва§Ха§≤а•Н৙ а§Ха•З ৪ৌ৕ а§Єа§Ѓа§ѓ (а§Ѓа§Ња§За§Ха•На§∞а•Ла§Єа•За§Ха§Ва§° а§Ха•А ১а•Аа§Є а§Єа•За§Ха§Ва§°).
а§Х৮а•За§Ха•На§Яа§∞ “ICSP” а§ѓа§є а§≠а•А а§°а•Аа§ђа§Ча§ња§Ва§Ч а§Ха•З а§≤а§ња§П а§Па§Х а§ѓа•Ва§Па§Єа§ђа•А а§Іа§Ња§∞ৌ৵ৌ৺ড়а§Х а§Х৮৵а§∞а•На§Яа§∞ а§Х৮а•За§Ха•На§Я а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ৮ড়ৃа§В১а•На§∞а§£ а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Ха•З ৪ৌ৕ ৙а•Аа§Жа§Иа§Єа•А а§Ха§Ња§∞а•На§ѓа§Ха•На§∞а§Ѓ ৙а•На§∞а§ѓа•Ла§Ч а§Ха§ња§ѓа§Њ а§Ьৌ১ৌ а§єа•И. а§Еа§Ча§≤а§Њ а§Е৮а•Ба§≠а§Ња§Ч ৶а•За§Ца•За§В “а§Ђа§∞а•Нু৵а•За§ѓа§∞”.
а§Ж৙ а§Ђа§∞а•Нু৵а•За§ѓа§∞ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Ха•Й৮а•На§Ђа§Ља§ња§Ча§∞ а§Ха§∞১а•З а§єа•Иа§В, ১а•Л а§Х৮а•За§Ха•На§Яа§∞ “а§Ж৙а§Ха•З а§Єа•Ба§Эৌ৵” а§ѓа§є а§Па§Х а§Єа•Н৕ড়১ড় а§Ха•Л ুৌ৙৮а•З ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Єа•З а§Х৮а•За§Ха•На§Я а§єа•Л৮ৌ а§Ж৵৴а•На§ѓа§Х. а§Жа§Ѓ ১а•Ма§∞ ৙а§∞ а§За§Є ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Єа§Ца•Н১а•А а§Єа•З а§Й১а•Н৙ৌ৶৮ ৴ৌীа•На§Я а§Ха•З а§≤а§ња§П а§ѓа•Ба§Ча•Нুড়১ а§єа•И, а§Ьа•Л а§Ха§Ѓа•А а§Ча§ња§ѓа§∞ а§ѓа§Њ а§ђа•За§≤а•На§Я а§Ха•З а§Ѓа§Ња§Іа•На§ѓа§Ѓ а§Єа•З а§°а•На§∞а§Ња§З৵ ৴ৌীа•На§Я ৶а•Н৵ৌа§∞а§Њ а§≤а•З а§Ьа§Ња§ѓа§Њ а§Ьৌ১ৌ а§єа•И. ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§≠а•А а§ђа§єа•Б-а§єа•Л а§Єа§Х১ৌ а§єа•И а§Фа§∞ а§Па§Х а§∞а•За§Ца•Аа§ѓ ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П, ৪ৌুৌ৮а•На§ѓ а§∞а•В৙ а§Єа•З а§Ха•З а§ђа•Аа§Ъ а§Ѓа•Ва§≤а•На§ѓа•Ла§В а§Ха•З ৪ৌ৕ 1 k а§Уа§Ѓ а§Фа§∞ 10 k а§Уа§Ѓ. ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Ха•З а§Ха•За§В৶а•На§∞а•Аа§ѓ а§Ха•За§В৶а•На§∞а•Аа§ѓ а§Х৮а•За§Ха•На§Яа§∞ а§Єа•З а§Х৮а•За§Ха•На§Я а§єа•Л৮ৌ а§Ж৵৴а•На§ѓа§Х, а§Ъড়১а•На§∞ а§Ѓа•За§В ১ৌа§∞ ৮ৌু FBK а§єа•И.
а§Ѓа§Ња§Ѓа§≤а•З а§Ха§њ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ ৵ড়৙а§∞а•А১ ৙а§∞ а§Ьа§Ча§є а§≤а•З১ৌ а§єа•И, ১а•Л а§Ж৙ а§Й৮ ৶а•Л৮а•Ла§В а§Ха•З а§ђа•Аа§Ъ ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Ха•З ৶а•Л ৙а§Ха•На§Ј а§Х৮а•За§Ха•Н৴৮ а§Єа•Н৵а•И৙ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В. а§≤а•За§Хড়৮ ৪ৌ৵৲ৌ৮ а§∞а§єа•За§В а§Ха§њ а§Ха•За§В৶а•На§∞ а§єа§Ѓа•З৴ৌ FBK а§Єа•З а§Х৮а•За§Ха•На§Я а§єа•Л৮ৌ а§Ж৵৴а•На§ѓа§Х. а§Ж৙ а§Еа§Єа§Ђа§≤ а§єа•Л ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ а§Ча§∞а•На§Ѓ а§Фа§∞ а§Ха•Нৣ১ড়а§Ча•На§∞а§Єа•Н১ а§єа•Л а§Єа§Х১ৌ а§єа•И.
а§ѓа§є а§Яа•На§∞а§ња§Ѓа§∞ “а§≤а§Ња§≠”, а§ѓа§є а§Ѓа•И৮а•На§ѓа•Ба§Еа§≤ а§∞а•В৙ а§Єа•З ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Ха•З а§≤а§Ња§≠ а§Ха•Л а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ха§Ња§∞а•На§ѓ а§Ха§∞১ৌ а§єа•И, а§ѓа§є а§Ха•З৵а§≤ а§Ха•Ба§Ы а§Ђа§∞а•Нু৵а•За§ѓа§∞ ৵ড়৮а•На§ѓа§Ња§Є а§Ха•З ৪ৌ৕ а§Фа§∞ а§Ѓа•Ба§Ца•На§ѓ а§∞а•В৙ а§Єа•З а§Па§Х ৮а§П а§За§Ва§Ь৮ а§Ха•З ৙а§∞а•Аа§Ха•На§Ја§£ а§Ха•З ৶а•Ма§∞ৌ৮ а§Й৙ৃа•Ла§Ч а§Ха§∞১ৌ, а§Ђа§Ља§Ња§З৮-а§Яа•На§ѓа•В৮ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Ѓа•Ва§≤а•На§ѓа•Ла§В а§Ха•З а§≤а§ња§П. а§ђа§Ња§Іа§Њ R4 ICSPCLK а§Єа§Ва§Ха•З১ а§Єа•З а§Яа•На§∞а§ња§Ѓа§∞ а§Еа§≤а§Ч а§Ха§∞১ৌ, а§Ж৙ а§Іа§Ња§∞ৌ৵ৌ৺ড়а§Х а§Ха•З ৪ৌ৕ а§°а•Аа§ђа§Ча§ња§Ва§Ч а§Ха•З а§≤а§ња§П ICSPCLK а§Єа§Ва§Ха•З১ а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞ а§Єа§Х১а•З ১а•Л.
৵а•Ла§≤а•На§Яа•За§Ь а§∞а•За§Ча•Ба§≤а•За§Яа§∞ “IC3” а§Ха•А а§Па§Х ৵а•Ла§≤а•На§Яа•За§Ь ৐৮ৌ১ৌ а§єа•И 3.3 ৵ৌа§≤а•На§Я а§ђа§єа•Б১ а§Єа•Н৕ড়а§∞. а§ѓа§є ৵а•Ла§≤а•На§Яа•За§Ь а§Ђа§Ља•Аа§° а§Ѓа§Ња§За§Ха•На§∞а•Л ৮ড়ৃа§В১а•На§∞а§Х, ৙а•Ла§Яа•За§В৴ড়ৃа•Ла§Ѓа•Аа§Яа§∞ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ, Qtr1 а§Яа•На§∞а§ња§Ѓа§∞ а§Фа§∞ optocoupler IC1.
৙а•Аа§Жа§Иа§Єа•А а§Ха•З ৶а•Л а§Й১а•Н৙ৌ৶৮ а§Єа§Ва§Ха•З১а•Ла§В, ৮ৌু а§Фа§∞ PWM1 PWM2 ৪ৌ৕, а§Ѓа§Ха•На§Ца•А ৙а•Ба§≤ а§Ъа§Ња§∞ MOSFET ৶а•Н৵ৌа§∞а§Њ а§Ч৆ড়১ а§Ъড়৙ SI4599 а§Ѓа•За§В ৮ড়৺ড়১. ৙а•Ба§≤ а§Па§Х PWM а§Єа§Ва§Ха•З১ а§Йа§Ъа•На§Ъ а§Ж৵а•Г১а•Н১ড় а§Ха•З ৪ৌ৕ а§ђа§В৶ а§Ха§∞ ৶ড়ৃৌ а§єа•И (৪ৌুৌ৮а•На§ѓ а§∞а•В৙ а§Єа•З 16 а§ѓа§Њ 32 KHz), а§Ьа•Л а§За§Ва§Ь৮ а§Ха•А а§Ч১ড় а§Ха•Л ৮ড়ৃа§В১а•На§∞ড়১ а§Ха§∞১ৌ а§єа•И а§Фа§∞ а§ѓа§є а§Па§Х а§єа•А ৶ড়৴ৌ а§ѓа§Њ а§Ха§ња§Єа•А а§Е৮а•На§ѓ а§∞а•В৙ а§Ѓа•За§В а§ђа§Ња§∞а•А а§ђа§Ња§∞а•А а§Єа•З ৐৮ৌ১ৌ а§єа•И. commutations ৶а•Ма§∞ৌ৮ ৙а•Аа§Жа§Иа§Єа•А а§Єа•Б৮ড়৴а•На§Ъড়১ а§Ха§∞১ৌ а§єа•И а§Ха§њ ৙а•Ба§≤ а§Ха•А ৶а•Л ৴ৌа§Ца§Ња§Па§В а§Па§Х ৪ৌ৕ а§ђа§В৶ а§Ха§∞ ৶ড়ৃৌ а§Ха§≠а•А ৮৺а•Аа§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В (а§Ьа•Л а§єа•Ла§Ча§Њ ৴а•Йа§∞а•На§Я а§Єа§∞а•На§Ха§ња§Я а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ж৙а•Ва§∞а•Н১ড়).
а§Ж৙а•Ва§∞а•Н১ড় ৵а•Ла§≤а•На§Яа•За§Ь а§За§Ва§Ь৮ а§Ха•З а§≤а§ња§П а§Е৮а•Ба§Ха•Ва§≤ড়১ а§Ха§ња§ѓа§Њ а§Ьৌ৮ৌ а§Ъа§Ња§єа§ња§П, а§Еа§Ча§∞ а§ѓа§є а§ђа§єа•Б১ а§Ьа•Нৃৌ৶ৌ а§єа•И а§Ѓа•Ла§Яа§∞ а§Ьа§≤а§Њ а§Єа§Х১ৌ а§єа•И. а§Ж৙ а§Єа•На§Ха•Аа§Ѓа§Њ а§Ѓа•За§В ৙а§∞ড়৵а§∞а•Н১৮ ৮৺а•Аа§В а§Ха§∞ а§∞а§єа•З а§єа•Иа§В ১а•Л а§Єа•З а§Ж৙а•Ва§∞а•Н১ড় ৵а•Ла§≤а•На§Яа•За§Ь а§Ха•З а§≤а§ња§П а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ 8 а§Ѓа•За§В 35 ৵а•Ла§≤а•На§Я. а§Жа§∞а•За§Ц а§Єа§В৴а•Л৲৮а•Ла§В а§Е৮а•На§ѓ ৶а•Л а§ђа§ња§Ьа§≤а•А а§Ха•А а§Ж৙а•Ва§∞а•Н১ড় ৴а•На§∞а•Га§Ва§Ца§≤а§Њ а§Ха•А а§Е৮а•Бু১ড় ৶а•З৮а•З а§Ха•З а§≤а§ња§П а§Ха§ња§ѓа§Њ а§Ьа§Њ а§Єа§Х১ৌ а§Єа•З ৙১ৌ а§Ъа§≤১ৌ. ৙৺а§≤а•З а§Єа•Аа§Ѓа§Њ (а§Єа•З 3 а§Ѓа•За§В 15 ৵а•Ла§≤а•На§Я) а§ѓа§є а§Ха•З৵а§≤ а§Ха§Ѓ R7 R12 а§Фа§∞ а§Ха§∞৮а•З а§Ха•А а§Ж৵৴а•На§ѓа§Х১ৌ а§єа•И. ৶а•Ва§Єа§∞а•А а§∞а•За§Ва§Ь (а§Єа•З 4.5 а§Ѓа•За§В 35 ৵а•Ла§≤а•На§Я) а§ѓа§є R7 R12 а§Фа§∞ а§Ьа§Ча§є а§Ха•А а§Ж৵৴а•На§ѓа§Х১ৌ а§єа•И а§Фа§∞ а§ѓа§є а§≠а•А ৶а•Л а§Ьа•З৮а§∞ а§°а§Ња§ѓа•Ла§° а§Ьа•Лৰ৊৮а•З а§Ха•З а§≤а§ња§П 18 ৵а•Ла§≤а•На§Я.
а§Ђа§∞а•Нু৵а•За§ѓа§∞
а§Па§Х ৙а•На§∞а•Ла§Ча•На§∞а§Ња§Ѓа§∞ Pickit2 а§Ьа•Лৰ৊৮а•З ICSP а§Єа§Ва§ђа§Ва§Іа§Х ৙а§∞ (৶а•За§Ца•За§В а§ѓа§є ৙а•Га§Ја•Н৆). а§Іа•Нৃৌ৮ ৶а•За§В а§Ха§њ а§Ђа§Ља§Ња§За§≤ PK2DeviceFile.dat, а§Ьа•Л а§≠а•А а§За§Є ৙а§∞а§ња§ѓа•Ла§Ь৮ৌ а§Ѓа•За§В а§За§Єа•Н১а•За§Ѓа§Ња§≤ PIC12F1572 ৴ৌুড়а§≤, а§ѓа§є Pickit2 а§≤а§ња§П а§єа•А ুৌ৮а•На§ѓ а§єа•И. ১а•Л а§Єа§ђа§Єа•З а§Еа§Іа§ња§Х а§Єа§Ва§≠ৌ৵৮ৌ PicKit3 а§Ха•З ৪ৌ৕ а§За§Є ৙а•Аа§Жа§Иа§Єа•А а§Ха§Ња§∞а•На§ѓа§Ха•На§∞а§Ѓ а§Ха§∞৮а•З а§Ѓа•За§В а§Єа§Ха•На§Ја§Ѓ ৮৺а•Аа§В (а§ѓа§Њ а§Ха§Ѓ а§Єа•З а§Ха§Ѓ а§єа§Ѓ а§Ж৙ а§Ха•Иа§Єа•З ৶ড়а§Цৌ৮а•З а§Ха•З а§≤а§ња§П ৙১ৌ ৮৺а•Аа§В а§єа•И).
а§Ь৊ড়৙ а§Ѓа•За§В а§Ж৙ а§За§Є а§Е৮а•Ба§≠а§Ња§Ч а§Ха•З а§Еа§В১ а§Ѓа•За§В а§°а§Ња§Й৮а§≤а•Ла§° а§Ж৙ а§Ђа§Ља§Ња§За§≤ а§Ѓа§ња§≤а•За§Ча§Њ ServoPid35.hex ৙৺а§≤а•З а§Єа•З а§єа•А ৙а•Ва§∞а§Њ а§Ха§ња§ѓа§Њ а§Фа§∞ ১а•Иа§ѓа§Ња§∞ ৙а•Аа§Жа§Иа§Єа•А а§Ѓа•За§В PICKit2 а§Ха•З ৪ৌ৕ а§≤а§ња§Ца§Њ а§єа•Л৮ৌ а§Ъа§Ња§єа§ња§П.
а§За§Є а§Ђа§Ља§Ња§За§≤ а§Ѓа•За§В а§Єа§∞а§≤ а§Єа§Ва§Єа•На§Ха§∞а§£ ৮ড়ৃа§В১а•На§∞а§£ а§єа•И. ৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ ৮а•На§ѓа•В৮১ু а§Єа•З а§Еа§Іа§ња§Х১ু а§Ъа§Ња§≤ а§Ха•З а§≤а§ња§П ৶а•Л ৶ড়৴ৌа§Уа§В а§Ѓа•За§В а§Ъа§∞ а§Ч১ড় а§Ѓа•Ла§Яа§∞ а§Еа§≤а§Ч а§Ха§∞а§Ха•З. а§Па§Х а§Ха•За§В৶а•На§∞а•Аа§ѓ а§Єа•Н৕ৌ৮ а§Ѓа•За§В ৮ড়ৃа§В১а•На§∞а§£ а§Єа§Ва§Ха•З১ а§Ха•З ৪ৌ৕, а§Ѓа•Ла§Яа§∞ а§ђа§В৶ а§єа•Л а§Ьৌ১ৌ а§єа•И.
а§Єа•Аа§∞а§ња§ѓа§≤ а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Єа•З а§°а•Аа§ђа§Ч а§°а•За§Яа§Њ а§≠а•За§Ь৮а•З
১ৌа§∞ ICSPCLK ICSP а§Х৮а•За§Ха•На§Яа§∞ а§≠а•А а§Іа§Ња§∞ৌ৵ৌ৺ড়а§Х а§≤а§Ња§З৮ а§Ха•З а§≤а§ња§П а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Єа•З а§°а§ња§ђа§Ч а§°а•За§Яа§Њ а§≠а•За§Ь৮а•З а§Ха•З а§≤а§ња§П ৙а•На§∞а§ѓа•Ла§Ч а§Ха§ња§ѓа§Њ а§Ьৌ১ৌ а§єа•И. а§За§Єа§Ха§Њ а§За§Єа•Н১а•За§Ѓа§Ња§≤ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ж৙ GND а§Фа§∞ RX а§Ра§Єа•А а§Ха•На§ѓа§Њ а§За§Є а§Ы৵ড় а§Ѓа•За§В ৶а•За§Ца§Њ а§Ьৌ১ৌ а§єа•И а§Ха•З а§∞а•В৙ а§Ѓа•За§В а§Па§Х а§Єа•Аа§∞а§ња§ѓа§≤-а§ѓа•Ва§Па§Єа§ђа•А а§Х৮৵а§∞а•На§Яа§∞ а§Ха§Њ ৙ড়৮ а§Єа•З GND а§Фа§∞ ICSPCLK а§Х৮а•За§Ха•На§Я а§Ха§∞৮ৌ.
১а•Л а§Ђа§ња§∞ ১а•Ба§Ѓ а§Ђа§∞а•Нু৵а•За§ѓа§∞ ৐৶а§≤৮а•З а§Іа§Ња§∞ৌ৵ৌ৺ড়а§Х а§°а§ња§ђа§Ч а§Єа•З ুৌ৮ а§≠а•За§Ь৮а•З а§Ха§Њ, а§Ж৵а•З৶৮ а§Ха•З ৪ৌ৕ а§°а•За§Яа§Њ ৙а•На§∞ৌ৙а•Н১ а§Яа§∞а•Нুড়৮а§≤ а§Фа§∞ ৵а•Иа§Ха§≤а•Н৙ড়а§Х а§∞а•В৙ а§Єа•З а§Й৮ а§≤а•Ла§Ча•Ла§В а§Ха•З ৪ৌ৕ ৙а•На§∞৶а§∞а•Н৴ড়১ SignalScope а§єа§Ѓа§Ња§∞а•А ৙а•На§∞а§£а§Ња§≤а•А а§Ха§Њ а§ѓа§Њ а§Е৮а•На§ѓ а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В.
а§Єа§В৙ৌ৶ড়১ а§Ха§∞а•За§В а§Фа§∞ recompile а§Ђа§∞а•Нু৵а•За§ѓа§∞
а§С৙а§∞а•За§Яа§ња§Ва§Ч ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞ а§Ха•Л ৐৶а§≤৮а•З а§Фа§∞ а§Єа§ђа§Єа•З а§Ьа§Яа§ња§≤ а§Єа§Ва§Єа•На§Ха§∞а§£ ৮ড়ৃа§В১а•На§∞а§£ а§≤а§Ња§Ча•В а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П (৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§Фа§∞ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛа§Ха•З ৪ৌ৕ а§Єа•Н৕ড়১ড় ৮ড়ৃа§В১а•На§∞а§£) а§Ж৙ а§Ђа§Ља§Ња§За§≤ а§Ха•Л а§Єа§В৙ৌ৶ড়১ а§Ха§∞৮ৌ а§єа•Ла§Ча§Њ ServoPid35.bas а§Фа§∞ а§Ха§В৙ৌа§За§≤. а§Єа§Ва§Ха§≤৮ а§Па§Х а§Ђа§Ља§Ња§За§≤ ৐৮ৌ১ৌ а§єа•И а§єа•За§Ха•На§Є а§ѓа§є Pickit2 ৪ৌ৕ ৙а•Аа§Жа§Иа§Єа•А а§Ѓа•За§В а§≤а§ња§Ца§Њ а§Ьа§Њ а§Єа§Х১ৌ а§єа•И а§Ьа•Л.
а§Ђа§Ња§За§≤ а§Ха•Л а§Єа§В৙ৌ৶ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§єа§Ѓ а§Й১а•На§Ха•Га§Ја•На§Я а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞৮ৌ а§Ъа§Ња§єа§ња§ѓа•З FineLineIDE а§Фа§∞ а§Єа§Ва§Ха§≤ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ProtonCompiler.
৶а•Л৮а•Ла§В ৵а•З а§Єа•Н৵১а§В১а•На§∞ а§єа•Иа§В а§Фа§∞ а§Ж৙ ৮ড়ুа•Н৮а§≤а§ња§Цড়১ а§≤а§ња§Ва§Х а§Єа•З а§°а§Ња§Й৮а§≤а•Ла§° а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В:
www.protonbasic.co.uk/content.php/2077-FineLineIDE
www.protonbasic.co.uk/vbdownloads
৮ড়а§∞а•Н৶а•З৴ а§Фа§∞ а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Єа§В৴а•Л৲ড়১ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ু৶৶а§Ча§Ња§∞ а§Яড়৙а•На§™а§£а§ња§ѓа§Ња§Б а§Ђа§Ља§Ња§За§≤ а§Ѓа•За§В ৙ৌৃৌ а§Ьа§Њ а§Єа§Х১ৌ ServoPid35.bas а§Фа§∞ а§Ђа§Ља§Ња§За§≤ а§Ха•З а§Еа§В১ а§Ѓа•За§В а§Ж৙ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞а•На§Є а§Ха•Л а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§∞৮а•З ৶а§∞ а§Х৶ু ৮ড়а§∞а•Н৶а•З৴ а§Ха•З ৶а•Н৵ৌа§∞а§Њ ৙а•На§∞а§ѓа•Ла§Ч а§Ха§ња§ѓа§Њ ৮ড়ৃুа•Ла§В а§Фа§∞ а§Х৶ু а§Ха•А ৴৐а•Н৶ৌ৵а§≤а•А а§Ѓа§ња§≤а•За§Ча§Њ.
а§Іа•Нৃৌ৮ а§∞а§єа•З а§ѓа§є а§Па§Х а§Ьа§Яа§ња§≤ а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§єа•И а§Фа§∞ а§ѓа§є а§Ж৪ৌ৮ а§Па§Х а§Йа§Ъড়১ ১а§∞а•Аа§Ха•З а§Єа•З а§Е৙৮а•З а§Єа§≠а•А ৵ড়а§Ха§≤а•Н৙а•Ла§В а§Єа•Аа§Ц৮а•З а§Фа§∞ ৙а•На§∞а§ѓа•Ла§Ч а§Ха§∞৮а•З ৮৺а•Аа§В а§єа•Ла§Ча§Њ. а§Єа§ђа§Єа•З а§Х৆ড়৮ а§єа§ња§Єа•На§Єа§Њ ৮ড়৴а•На§Ъড়১ а§∞а•В৙ а§Єа•З а§ђа§Ъ৮а•З а§Ха•З ৶а•Ла§≤৮ а§Ха§∞৮а•З а§Ха•З а§Ха•На§∞а§Ѓ а§Ѓа•За§В ৙а•Аа§Жа§Иа§°а•А вАЛвАЛ৙а•Иа§∞а§Ња§Ѓа•Аа§Яа§∞а•На§Є а§Ха•Л а§Єа§Ѓа§Ња§ѓа•Ла§Ьড়১ а§Ха§ња§ѓа§Њ а§Ьৌ১ৌ а§єа•И а§Фа§∞ а§Па§Х а§єа•А а§Єа§Ѓа§ѓ а§Ѓа•За§В а§Па§Х ১а•Н৵а§∞ড়১ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ а§Фа§∞ а§Ыа•Ла§Яа•З а§°а§Ња§И а§Ха•На§Ја•З১а•На§∞ а§Ха§∞ а§Єа§Х১а•З а§єа•Иа§В.
а§єа§Ѓ а§Е৙৮а•А ৙а•Ва§∞а•А а§Ха§ња§ѓа§Њ ৙а•Аа§Жа§Иа§°а•А вАЛвАЛুৌ৙৶а§Ва§°а•Ла§В а§Ха§Њ а§Єа§Ѓа§Ња§ѓа•Ла§Ь৮ а§Ха•А а§Єа•Б৵ড়৲ৌ а§Ха•З а§≤а§ња§П, а§Ьа§Ља•За§Ча•На§≤а§∞-৮ড়а§Ха•Ла§≤а•На§Є ৙৶а•Н৲১ড় а§Ха§Њ а§Й৙ৃа•Ла§Ч а§Ха§∞а§Ха•З а§Фа§∞ а§За§Єа•З а§Жа§Ча•З а§Єа§∞а§≤ ৐৮ৌ৮а•З. а§єа§Ѓ а§ѓа§є а§≠а•А ৵ড়৲ড় а§Ха•З а§Ха•Ба§Ы ১а•На§∞а•Ба§Яа§ња§ѓа•Ла§В а§Ха•Л ৆а•Аа§Х а§Ьа§Ља•За§Ча•На§≤а§∞-৮ড়а§Ха•Ла§≤а•На§Є ৵ড়а§Хড়৙а•Аа§°а§ња§ѓа§Њ ৙а§∞ ৙а•На§∞а§Хৌ৴ড়১, а§≤а•За§Хড়৮ а§Па§Х ৮а§И ৙а•На§∞а§£а§Ња§≤а•А а§Ха•З а§≤а§ња§П ুৌ৮а§Ха•Ла§В а§Ха•А а§Єа•Н৕ৌ৙৮ৌ а§Ха•З (а§За§Ва§Ь৮, а§Ха§Яа•М১а•А а§Фа§∞ ৙а•На§∞১ড়а§Ха•На§∞а§ња§ѓа§Њ), а§ѓа§є ৵ড়৴а•За§Ја§Ьа•На§Юа•Ла§В ৶а•Н৵ৌа§∞а§Њ а§Па§Х а§С৙а§∞а•З৴৮ ৐৮а•А а§єа•Ба§И а§єа•И.
а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Ха•З а§≤а§ња§П ৮а•Ла§Яа•На§Є
MOSFETs ৙а§∞ а§Е৙৵а•На§ѓа§ѓ а§Ха•Л а§Ха§Ѓ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П а§Ђа§∞а•Нু৵а•За§ѓа§∞ а§Ѓа•За§В PWM а§Ха•З а§≤а§ња§П а§Ха§Ѓ а§Ж৵а•Г১а•Н১ড় а§Єа•За§Я а§Ха§∞৮а•З а§Ха•А а§Єа§≤а§Ња§є ৶а•А а§Ьৌ১а•А а§єа•И. а§Жа§Ѓ ১а•Ма§∞ ৙а§∞ а§Ж৵а•Г১а•Н১ড় ৙а§∞ а§Єа•За§Я а§єа•Л১а•А а§єа•И 20 KHz а§≤а•За§Хড়৮ а§Ха•Ба§Ы а§Е৮а•Б৙а•На§∞а§ѓа•Ла§Ча•Ла§В а§Ѓа•За§В ৺ু৮а•З а§За§Єа•З а§Ха§Ѓ а§Ха§∞ ৶ড়ৃৌ а§єа•И 2 KHz MOSFETs а§Ха•А а§єа•Аа§Яа§ња§Ва§Ч а§Єа§Ѓа§Єа•На§ѓа§Њ а§Ха•Л ৵а•Нৃৌ৵৺ৌа§∞а§ња§Х а§∞а•В৙ а§Єа•З ৴а•В৮а•На§ѓ а§Ха§∞ ৶а•З১ৌ а§єа•И.
а§Па§Хুৌ১а•На§∞ contraindication ৴а•Ла§∞ а§єа•И а§Ьа•Л ৕а•Ла§°а§Ља§Њ ৐৥৊ а§Ьа§Ња§Па§Ча§Њ. а§За§Єа§≤а§ња§П ৙а•Аа§°а§ђа•На§≤а•Ва§Па§Ѓ а§Ђа§Ља•На§∞а•Аа§Ха•Н৵а•За§Ва§Єа•А а§Ха•Л а§Ха§Ѓ а§Ха§∞৮а•З а§Ха•А а§Ха•Л৴ড়৴ а§Ха§∞а•За§В а§Фа§∞ а§Ђа§ња§∞ а§Е৙৮а•А а§Ѓа•Ла§Яа§∞ а§Єа•З а§Ьа§Ња§Ба§Ъ а§Ха§∞а•За§В а§Ха§њ а§Ха•На§ѓа§Њ ৴а•Ла§∞ а§Ѓа•За§В ৵а•Г৶а•На§Іа§њ ৪৺৮а•Аа§ѓ а§єа•И.
а§°а§Ња§Й৮а§≤а•Ла§° а§Ђа§Ља§Ња§За§≤а•Ла§В а§Ђа§∞а•Нু৵а•За§ѓа§∞
৮ড়ুа•Н৮а§≤а§ња§Цড়১ а§Ѓа•За§В а§Ж৙ а§Ь৊ড়৙ а§Ђа§Ља§Ња§За§≤а•Ла§В а§Ха•Л ৥а•Ва§В৥৮ৌ:
– ServoPid35.hex а§Єа§∞а§≤ а§Єа§Ва§Єа•На§Ха§∞а§£ а§Ца•Ба§≤а§Њ а§≤а•В৙ а§Ѓа•За§В ৙а•Аа§Жа§Иа§Єа•А а§Ха§Ња§∞а•На§ѓа§Ха•На§∞а§Ѓ а§Ха•З а§≤а§ња§П ১а•Иа§ѓа§Ња§∞.
– а§Єа§В৙ৌ৶ড়১ а§Ха§∞а•За§В а§Фа§∞ Fineline IDE а§Ха•З ৪ৌ৕ а§Ха§В৙ৌа§За§≤ а§Ха§∞৮а•З а§Ха•З а§≤а§ња§П ServoPid35.bas
ServoPid_Firmware.zip