
スマートエンジン
スマートモーターが角位置を監視します, 回転速度, 出力ピンに加えられる加速度とトルク.
アプリケーションはUSBポートを介してこれらのモーターに接続し、モーターに到達する位置を指示します, 加速度, 最大速度とトルク. そして、エンジンはすべてのパラメータの現在の状態に応答します, 主に場所, 速度, カップル, 現在, 電圧と温度.
スマートモーターは自動化の聖杯です!
よく考えられた2つのモデルだけが 90% 産業用および民間用ドライブ
(ステッパー, サーボ, セレクター, ソレノイド, パンプス, 旋盤およびミル機, 3dプリンター, レーザー彫刻家…)
スマートモーターは基本的に他のモーターのすべての欠陥を排除します, 彼らはステップを失うことはありません, 調整可能です, 制御が簡単で信頼性が高い, それらは外部の電子機器を必要とせず、あなたがそれらを止めてもあなたの指を壊すことはありません, だから彼らはすることができます “コラボレーティブ”.
残念ながら、現在のモデルにはまだいくつかの欠点があります. しかし、私たちはそれらを完了することから一歩離れており、すぐに他のエンジンを置き換えることができるようになります, カッターで, プリンターで, 産業および民間の自動化の他のドライブで.

従来のエンジンには追加の電子機器とソフトウェアが必要であることを考慮すると FeeTech Smart Motorsの価格は、今日すでにほぼ競争力があります. 何百万ものコピーを作成することで、さらに下がって、さらに広い市場セグメントをカバーできるようになります。.
次のステップは、IPV6アドレスを提供し、ユニバース全体で一意にアドレス可能なオブジェクトにすることです。 (冗談じゃない).
エンジンの進化

数年前まで、スマートモーターは多くの費用がかかりました 500 ユーロアップ, それらは大きくて扱いにくく、それらを駆動するために大きなコントロールボックスと複雑な接続ケーブルが必要でした. しかし現在、すべての制御電子機器をエンジン自体に直接統合することは可能です.



フィーテック 3032 非常に小さいです, 唯一の重さ 21 グラム, のペアを持っています 4 kg-cmで約20ユーロかかります.
フィーテック 3215 重さ 55 グラム, のペアを持っています 19 kg-cmと10ユーロ強の費用がかかります.
新しいTmotモデルが準備されています (テレミノモーターズ) また、新しいフィーテックエンジンとセンチルエンジン. それらをお得な価格で入手するには、で見つけたLelloに問い合わせてください このページ.
ロボt コラボレーティブ

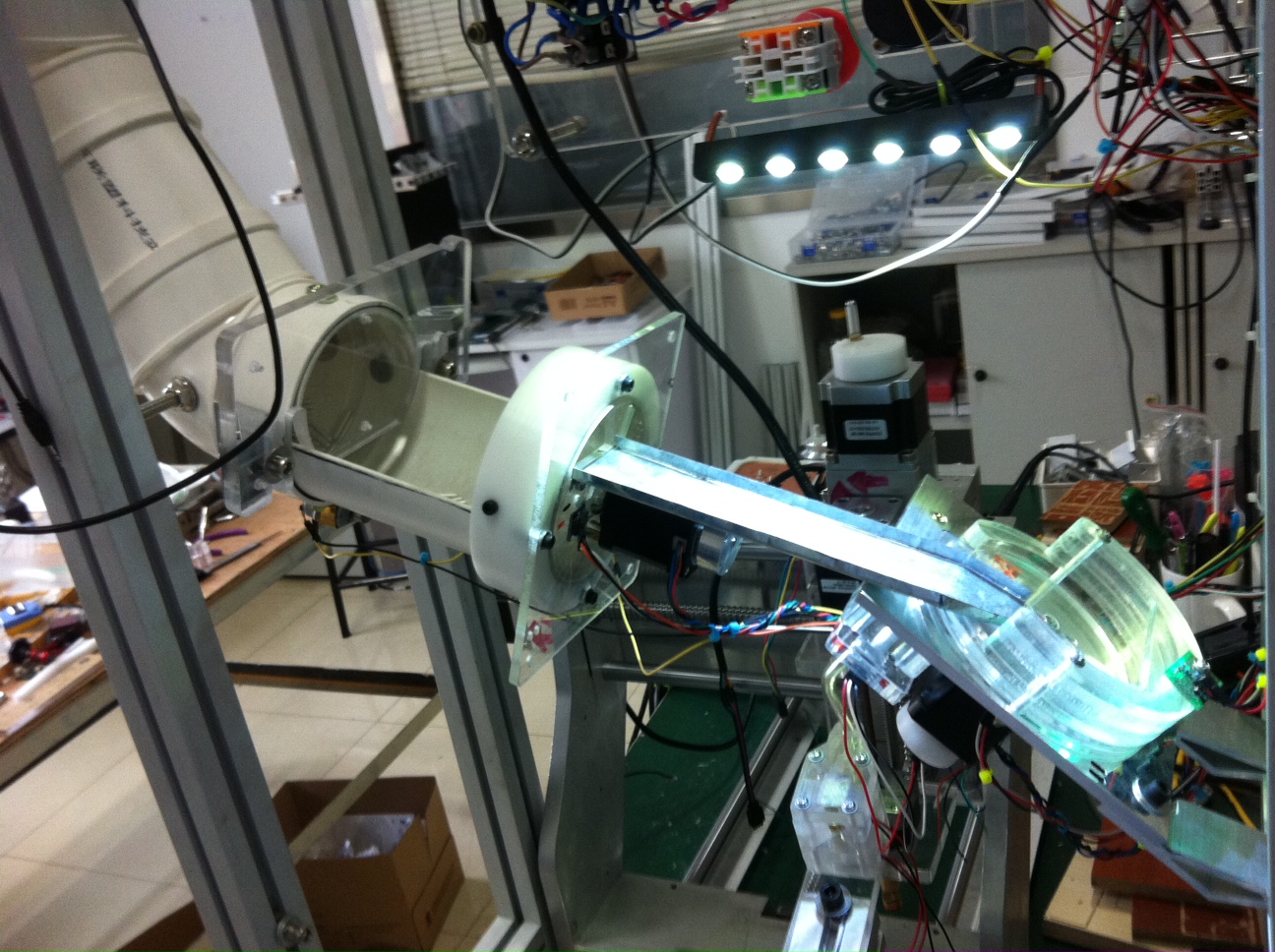
そしてで彼はロボットアームの実験にさかのぼります 2010
直接運動学と逆運動学の3Dアルゴリズムのキャリブレーションの難しさに比べて、得られる結果が不十分だったため、それ以来何も公開していません。.
今日 (2021), 10年以上の実験の後, 信じられないほどシンプルなソリューションを見つけました, 難しい寸法と角度のパラメータ設定を必要としない. 接続されているモーターの数とタイプを指定するだけで、すぐに移動して共同でプログラムできます.
Theremino_Cobotソフトウェアは、ロボットがどのように構成されているかについて何も知る必要はありません。, 大きいか小さいか、モーターが上に接続されているかどうかは関係ありません, 下または横に. ロボットアームはデカルト構成にすることができます, CoreXY, 関節式, DeltaまたはScaraを使用すると、この情報を使用してソフトウェアを構成しなくても、すぐに移動を開始できます。.
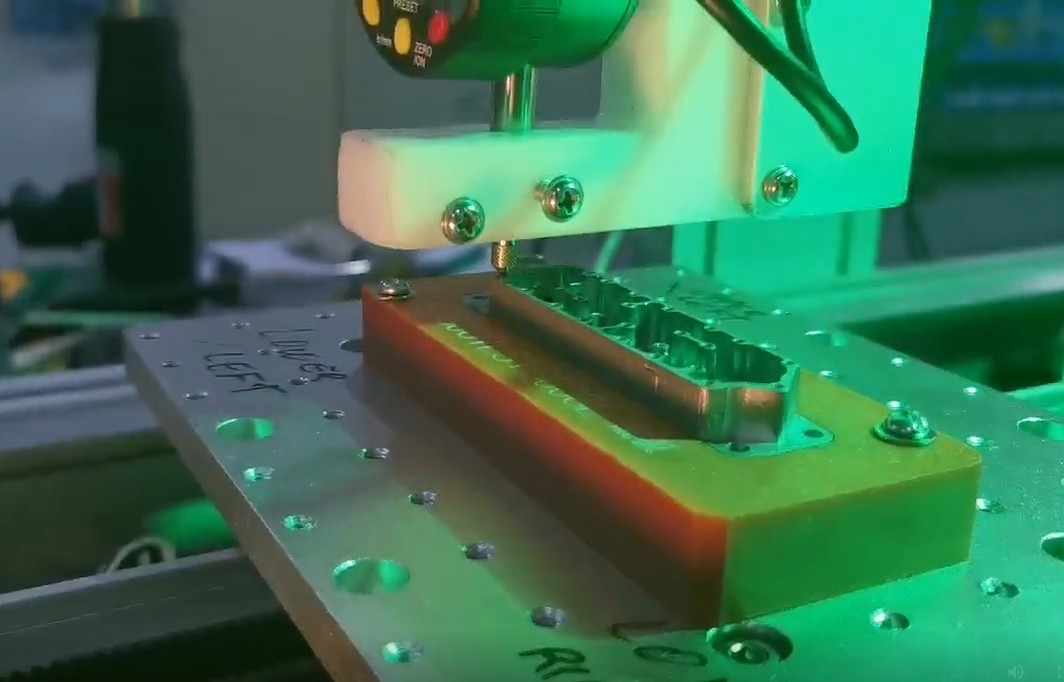
次のビデオは、Theremino_Cobotで何ができるかを示しています, Theremino_Motorsと数十ユーロのスマートモーター:
の夏の実験 2021
https://www.theremino.com/files/ThereminoCobotV1.mp4
そしてここにいくつかの最近の例があります (の秋 2022)
https://www.theremino.com/files/Cobot/CobotExample1.mp4
https://www.theremino.com/files/Cobot/CobotExample2.mp4
https://www.theremino.com/files/Cobot/CobotExample3.mp4
https://www.theremino.com/files/Cobot/CobotExample4.mp4
共同研究者によるこれらのトピックに関するプレゼンテーション Leonardo, 中国・深セン在住.
Bejing_Theremino_commercial_robot.pdf
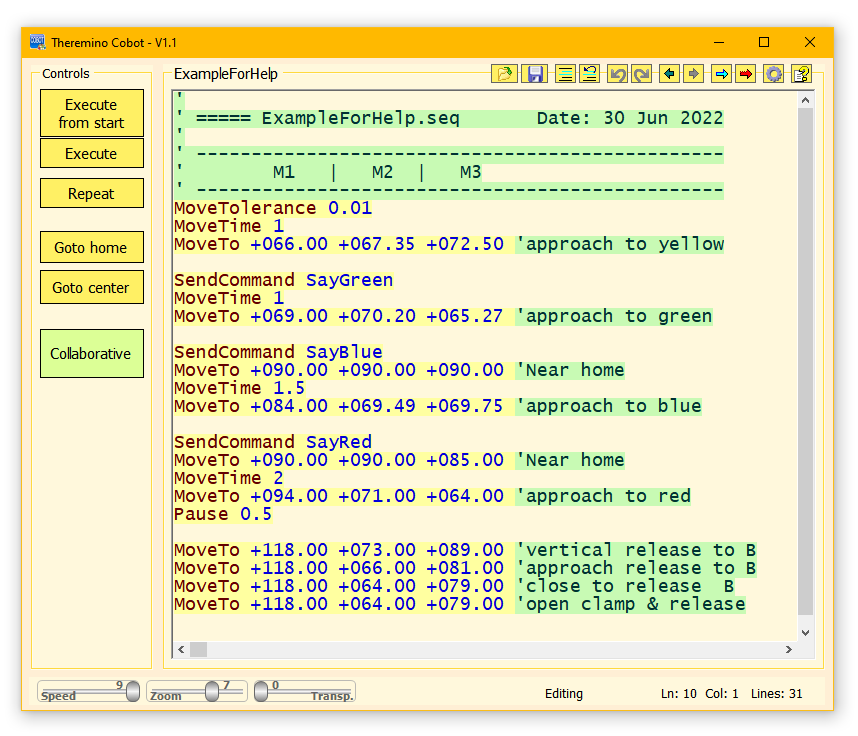
テレミノコボット

ドキュメントのダウンロード
(工事中 – ヘルプが不完全です)
PDF 形式のドキュメント
Theremino_Cobot_Help_ENG.pdf
Theremino_Cobot_Help_ITA.pdf
Theremino_Cobot_Help_CHN.pdf
Theremino_Cobot_Protocols_ENG.pdf
Theremino_Cobot_Protocols_ITA.pdf
Theremino_Cobot_Protocols_CHN.pdf
Theremino_Cobot_Security_ENG.pdf
Theremino_Cobot_Security_ITA.pdf
Theremino_Cobot_Security_CHN.pdf
元のドキュメント, OpenOffice 形式, 改訂および翻訳用
Theremino_Cobot_OpenOfficeDocs
アプリケーションをダウンロード
ダウンロード di テレミノコボット – バージョン管理 1.1
Theremino_Cobot_V1.1
Theremino_Cobot_V1.1_ソースあり
Windows XP から Windows のすべてのシステムの 10, 両方 32 で 64 ビット (Linux とワインと OSX)
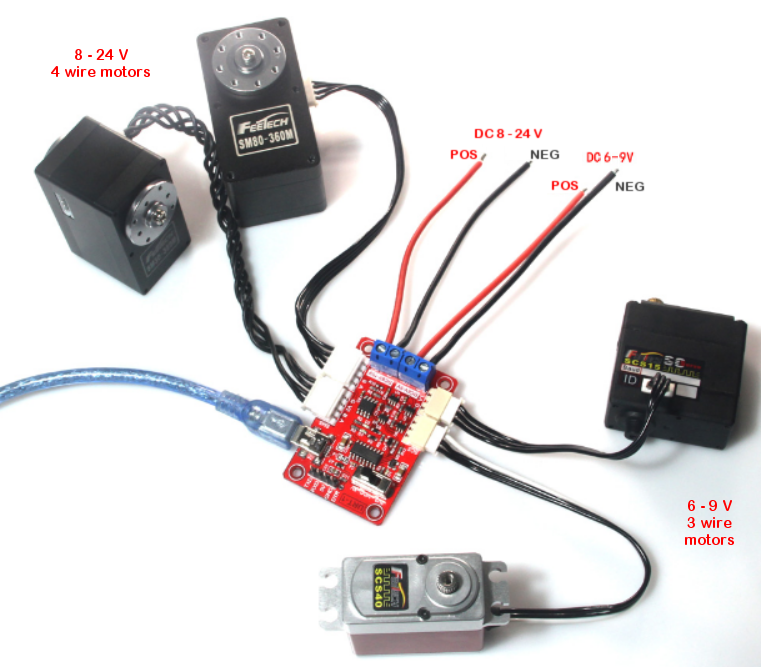
テレミノモーターズ
フィーテックスマートモーターズとの通信, ダイナミクセルとトモット (テレミノモーターズ)
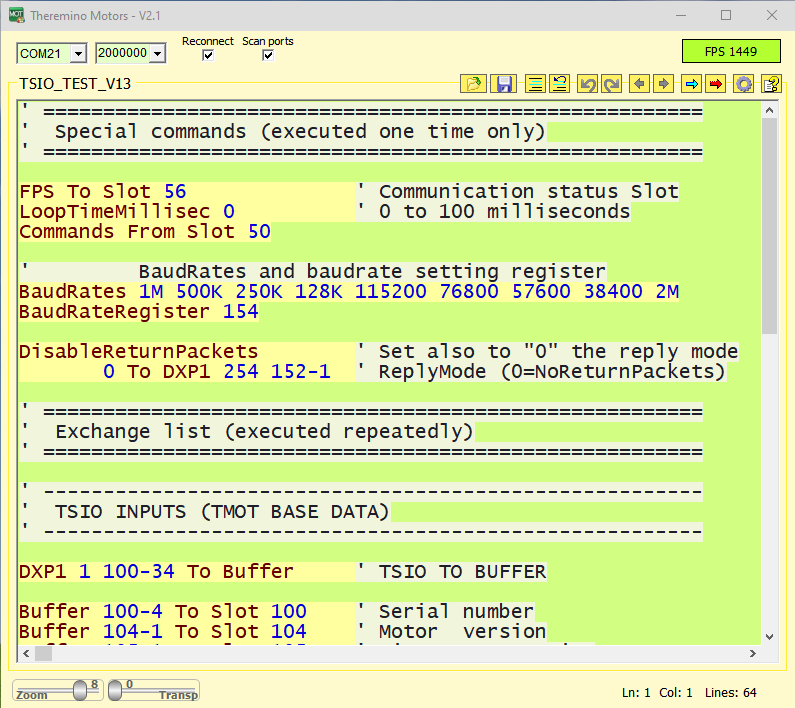
アプリケーションテレミノモーターズは、システムのスロットをスマートモーターのレジスタに接続します.
物理通信は、平衡RS485ライン、またはTX信号とRX信号を1本のワイヤで結合するTTLラインで行われます。 (ワンワイヤー). ワンワイヤ通信はコボットエンジンに最適, モーター間の距離は最大で数メートルであり、通常はすべてのモーターをガイドして応答を待つ単一のマスターが使用されるため、全二重通信は必要ありません。.
このアプリケーションは、DinamixelV1プロトコルを使用します (DXP1) フィーテックスマートモーターと通信することをお勧めします, ダイナミクセルとトモット (テレミノモーターズ). その指示は効率的であり、同時に多くのエンジンと通信することが可能です, 高い繰り返し時間を維持する.
あなたが正しい指示を使用するならば、あなたは克服することができます 500 1秒あたりの繰り返し. そしてこれは、繰り返しごとに、すべてのエンジンのすべてのパラメーターを書き込んでから再読み取りすることを意味します. 場合によっては、ワンワイヤー通信では、 1500 1秒あたりの繰り返し.
非常に高い通信速度により、モーターのすべてのパラメータを継続的に読み取ることができるため、最大の双方向性と常に流動的な動きを得ることができます。.
ドキュメントのダウンロード
PDF 形式のドキュメント
Theremino_Motors_Help_ITA.pdf
Theremino_Motors_Help_ENG.pdf
Theremino_Motors_Help_CHN.pdf
元のドキュメント, OpenOffice 形式, 改訂および翻訳用
Theremino_Motors_OpenOfficeDocs
アプリケーションをダウンロード
ダウンロード ディテレミノモーターズ – バージョンe 3.0
Theremino_Motors_V3.0
Theremino_Motors_V3.0 _ ソースあり
Windows XP から Windows のすべてのシステムの 10, 両方 32 で 64 ビット (Linux とワインと OSX)
テレミノModBus
FeeTechおよびSentelエンジン用の古くて遅いModBusプロトコルを使用する

Theremino ModBusアプリケーションは、システムのスロットをスマートモーターレジスタに接続します.
このアプリケーションは、以前のDXP1よりも効率が低く、FeeTechとSentelスマートモーターでのみ機能するModBusプロトコルを使用しています。. PLCの使用に慣れているものとの互換性のためにのみ提供しています.
ハードウェアPLCコントローラーの繰り返し率は非常に低い (小さい 20 1秒あたりの通信), そのため、ModBusを使用してもそれほどペナルティはありません. しかし、テレミノシステムでは少なくとも300に慣れていることを考えると…500 1秒あたりの繰り返し (までのヒント付き 1500 いくつかのケースで), このページの前の章で説明した DRP1 プロトコルを使用することをお勧めします.
ドキュメントのダウンロード
PDF 形式のドキュメント
Theremino_ModBus_Help_ITA.pdf
Theremino_ModBus_Help_ENG.pdf
Theremino_ModBus_Help_CN.pdf
元のドキュメント, OpenOffice 形式, 改訂および翻訳用
Theremino_ModBus_Help_ITA.odt
Theremino_ModBus_Help_ENG.odt
Theremino_ModBus_Help_CN.odt
アプリケーションをダウンロード
Thereminoでダウンロード ModBus - バージョン 1.2
Theremino_ModBus_V1.2
Theremino_ModBus_V1.2_WithSources
Windows XP から Windows のすべてのシステムの 10, 両方 32 で 64 ビット (Linux とワインと OSX)
RS485またはModBus用のFeeTechモーターをプログラムします
それらを購入すると、FeeTechモーターはすでにプログラムされています. 次の手順は、それらを再プログラムする場合、または通信プロトコルをRS485からModBusに、またはその逆に変更する場合にのみ役立ちます。.
ZIPファイル内 “Feetech_Motors_Programming_Kit” あなたはそれらをプログラムするためのファームウェアファイルとアプリケーションを見つけるでしょう “FD_1_9_8_1.exe”. そして、あなたはまた、アプリケーションを見つけるでしょう “FDUpdate.exe” 将来的にはFD_xxx_.exeの新しいバージョンをダウンロードするために使用される可能性があります.
ファームウェアプログラミングの詳細については、次のドキュメントをお読みください.
ドキュメントのダウンロード
PDF 形式のドキュメント
Feetech_Motors_Programming_ITA.pdf
Feetech_Motors_Programming_ENG.pdf
Feetech_Motors_Programming_CN.pdf
元のドキュメント, OpenOffice 形式, 改訂および翻訳用
Feetech_Motors_Programming_ITA.odt
Feetech_Motors_Programming_ENG.odt
Feetech_Motors_Programming_CN.odt
ファームウェアをダウンロードし、 それを書くためのアプリケーション
FeetechMotorsプログラミングキットのダウンロード-バージョン 1.1
Feetech_Motors_Programming_Kit_V1.1
Windows XP から Windows のすべてのシステムの 10, 両方 32 で 64 ビット (Linux とワインと OSX)
正直に言うと, それは私にとってコンパクトなサーボ機構です. あなたはモーターを持っています, ドライブ, エンコーダーはすべて1つの小さなソリューションにバンドルされています. 私はそれを正しく理解しますか? スマートモーターが独立したカテゴリーである理由?
トルク制御と位置決めをモーター自体に委任する, シンプルで本質的に信頼性が高く、協調的なシステムを構築できます. また, 複雑なケーブルでモーターに接続された大きな外部コントローラーがないという事実, すべてが違う.
これは、ネットワークに接続され、次に電球に接続されるワイヤーに接続されたライトコントローラーの同じ違いです。, そしてそれ自体ですべてを行うスマートランプ.
スマートランプは、それが開く可能性があるため、独自のクラスです, とスマートモーターはまったく同じです.