
Smart engines
A Smart Motor monitors the angular position, the speed of rotation, the acceleration and torque applied to the output pin.
Applications connect to these motors through a USB port and tell the motor where to go, acceleration, the maximum speed and torque. And the engine responds the current state of all parameters, mainly location, speed, couple, current, voltage and temperature.
The Smart Motor is the Holy Grail of automation!
Only two well thought out models could replace the 90% of industrial and civil drives
(stepper, servant, selectors, solenoids, pumps, lathe and mill machines, 3d printers, laser engravers…)
Smart Motors basically eliminate all the defects of other motors, they don't lose steps, are adjustable, easy to control and reliable, they require no external electronics and they won't break your fingers if you stop them, so they can be “cooperative”.
Unfortunately, the current models still have some shortcomings. But we are one step away from completing them and will soon be able to replace any other engine, in the cutters, in printers, and in any other drive of industrial and civil automation.

Considering that classic engines need additional electronics and software the price of FeeTech Smart Motors is already almost competitive today. By producing millions of copies, it will be able to go down further and cover ever wider market segments.
The next step will be to provide them with an IPV6 address and make them uniquely addressable objects throughout the universe (and we're not kidding).
Evolution of engines

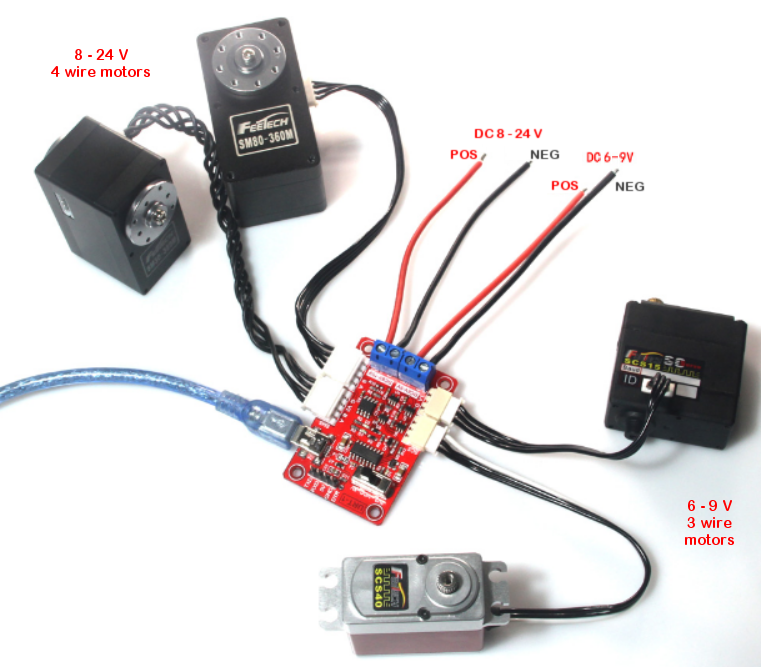
Until a few years ago, Smart Motors cost a lot 500 euro up, they were large and awkward and needed a large control box and complex connecting cables to drive them. But currently it is possible to integrate all the control electronics directly into the engine itself.



The FeeTech 3032 is very small, weighs only 21 grams, has a pair of 4 kg-cm and costs about twenty Euro.
The FeeTech 3215 Weighs 55 grams, has a pair of 19 kg-cm and costs just over ten Euro.
New Tmot models are being prepared (Theremino Motors) and also new FeeTech and Sentel engines. To get them with great prices ask Lello that you find in This page.
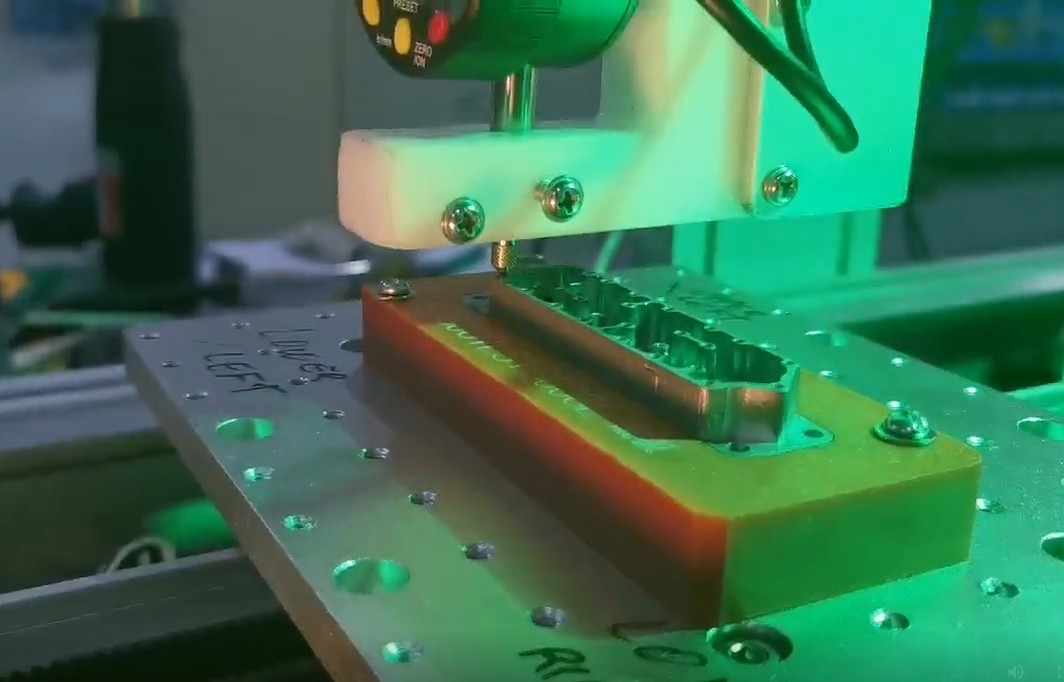
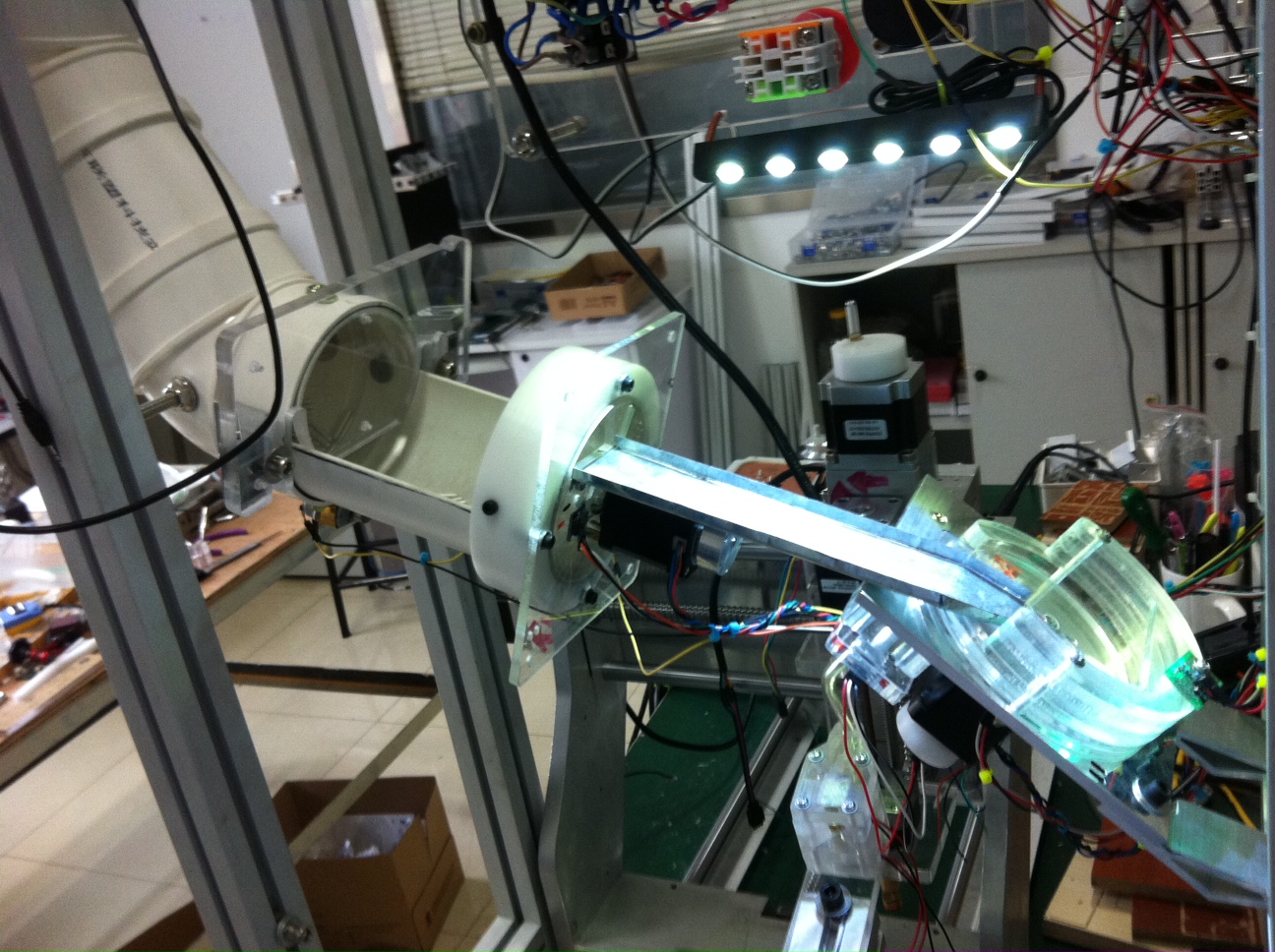
Robot Collaborative

And athe experiments with robotic arms date back to 2010
We have not published anything since then because the obtainable results were poor compared to the calibration difficulties of the 3D direct and inverse kinematics algorithms.
Today (2021), after over ten years of experiments, we have found incredibly simple solutions, that do not require difficult dimensional and angular parameter settings. Just indicate how many motors are connected and what type and you can immediately move and program them collaboratively.
The Theremino_Cobot software does not need to know anything about how the robot is composed, it doesn't matter if it's big or small and if the motors are connected on top, below or to the side. A robotic arm could be in Cartesian configuration, CoreXY, Articulated, Delta or Scara and you can immediately start moving it without configuring the software with this information.
The following videos show what you can do with Theremino_Cobot, Theremino_Motors and a few tens of euros of SmartMotors:
Summer experiments of the 2021
https://www.theremino.com/files/ThereminoCobotV1.mp4
And here are some recent examples (autumn of 2022)
https://www.theremino.com/files/Cobot/CobotExample1.mp4
https://www.theremino.com/files/Cobot/CobotExample2.mp4
https://www.theremino.com/files/Cobot/CobotExample3.mp4
https://www.theremino.com/files/Cobot/CobotExample4.mp4
A presentation on these topics by our collaborator Leonardo, living in Shenzhen, China.
Bejing_Theremino_commercial_robot.pdf
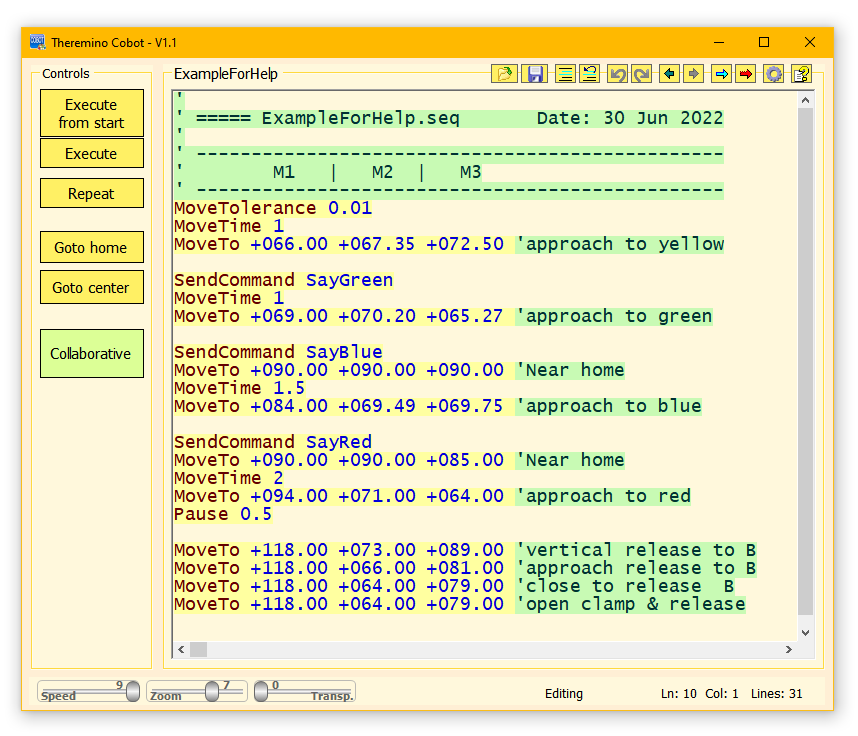
Theremino Cobot

Documentation downloads
(UNDER CONSTRUCTION – HELP IS INCOMPLETE)
Documentation in PDF format
Theremino_Cobot_Help_ENG.pdf
Theremino_Cobot_Help_ITA.pdf
Theremino_Cobot_Help_CHN.pdf
Theremino_Cobot_Protocols_ENG.pdf
Theremino_Cobot_Protocols_ITA.pdf
Theremino_Cobot_Protocols_CHN.pdf
Theremino_Cobot_Security_ENG.pdf
Theremino_Cobot_Security_ITA.pdf
Theremino_Cobot_Security_CHN.pdf
Original documents, OpenOffice format, for revisions and translations
Theremino_Cobot_OpenOfficeDocs
Download the application
Download di Theremino Cobot – Versione 1.1
Theremino_Cobot_V1.1
Theremino_Cobot_V1.1_WithSources
For all systems from Windows XP to Windows 10, both 32 which in 64 bit (Linux and OSX with Wine)
Theremino Motors
Communicating with FeeTech Smart Motors, Dynamixel and Tmot (Theremino Motors)
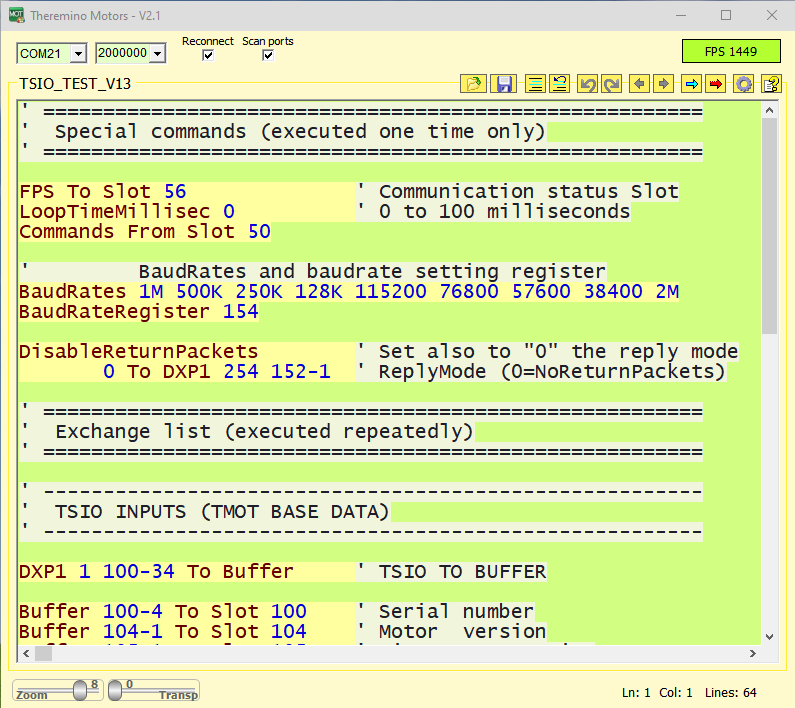
The application Theremino Motors connects the Slots of our system with the registers of Smart Motor.
Physical communication takes place on a balanced RS485 line or on a TTL line that joins the TX and RX signals on a single wire (One Wire). One Wire communication is great for Cobot engines, given that the distances between the motors are at most a few meters and that usually a single Master is used that guides all the motors and waits for answers and therefore does not require Full-Duplex communications.
This application uses the Dinamixel V1 protocol (DXP1) which we recommend to communicate with FeeTech Smart Motors, Dynamixel and Tmot (Theremino Motors). Its instructions are efficient and it is possible to communicate with many engines at the same time, maintaining high repetition times.
If you use the right instructions you can overcome the 500 repetitions per second. And this means that at each repetition you write and then reread all the parameters of all the engines. In some cases with One Wire communication you also get to peaks of 1500 repetitions per second.
The very high communication speed allows to continuously read all the parameters of the motors and therefore to obtain maximum interactivity and always fluid movements.
Documentation downloads
Documentation in PDF format
Theremino_Motors_Help_ITA.pdf
Theremino_Motors_Help_ENG.pdf
Theremino_Motors_Help_CHN.pdf
Original documents, OpenOffice format, for revisions and translations
Theremino_Motors_OpenOfficeDocs
Download the application
Download di Theremino Motors – Versione 3.0
Theremino_Motors_V3.0
Theremino_Motors_V3.0_WithSources
For all systems from Windows XP to Windows 10, both 32 which in 64 bit (Linux and OSX with Wine)
Theremino ModBus
Use the old and slow ModBus protocol for FeeTech and Sentel engines

The Theremino ModBus application connects the Slots of our system with the Smart Motor registers.
This application uses the ModBus protocol which is less efficient than the previous DXP1 and which only works with FeeTech and Sentel Smart Motors. We provide it only for compatibility with those used to using PLCs.
Hardware PLC controllers have a very low repetition rate (even less than 20 communications per second), so using the ModBus does not penalize them much. But given that in the theremino system we are used to at least 300…500 repetitions per second (with tips up to 1500 in some cases), it is preferable to use the drp1 protocol explained in the previous chapter of this page.
Documentation downloads
Documentation in PDF format
Theremino_ModBus_Help_ITA.pdf
Theremino_ModBus_Help_ENG.pdf
Theremino_ModBus_Help_CN.pdf
Original documents, OpenOffice format, for revisions and translations
Theremino_ModBus_Help_ITA.odt
Theremino_ModBus_Help_ENG.odt
Theremino_ModBus_Help_CN.odt
Download the application
Download it on Theremino ModBus - Version 1.2
Theremino_ModBus_V1.2
Theremino_ModBus_V1.2_WithSources
For all systems from Windows XP to Windows 10, both 32 which in 64 bit (Linux and OSX with Wine)
Program the FeeTech motors for RS485 or ModBus
When you buy them the FeeTech motors are already programmed. The following instructions are only needed if you want to reprogram them or want to change the communication protocol from RS485 to ModBus or vice versa..
In the ZIP file “Feetech_Motors_Programming_Kit” you will find the firmware files and the application to program them “FD_1_9_8_1.exe”. And you will also find an application “FDUpdate.exe” which could be used in the future to download newer versions of FD_xxx_.exe.
Read the following documentation for full details on firmware programming.
Documentation downloads
Documentation in PDF format
Feetech_Motors_Programming_ITA.pdf
Feetech_Motors_Programming_ENG.pdf
Feetech_Motors_Programming_CN.pdf
Original documents, OpenOffice format, for revisions and translations
Feetech_Motors_Programming_ITA.odt
Feetech_Motors_Programming_ENG.odt
Feetech_Motors_Programming_CN.odt
Download the firmware and application to write it
Feetech Motors Programming Kit Download - Version 1.1
Feetech_Motors_Programming_Kit_V1.1
For all systems from Windows XP to Windows 10, both 32 which in 64 bit (Linux and OSX with Wine)
To be honest, it is a compact servo mechanism to me. You’ve got a motor, drive, encoder all bundled into one small solution. Do I get it right? Why is smart motor a stand-along category?
Delegating torque control and positioning to the motor itself, allows you to build simple and intrinsically reliable and collaborative systems. Also, the fact that there is no large external controller connected to the motor with complex cables, makes everything different.
It is the same difference between a light controller connected to the network and then connected to wires that then go to a light bulb, and a Smart Lamp that does everything by itself.
A Smart Lamp is a class of its own due to the possibilities it opens up, and Smart Motors are exactly the same.